À la fin du 18ème siècle, la mécanique connaît une transformation conceptuelle profonde avec la publication, en 1788, de la Mécanique analytique de Joseph-Louis Lagrange. Cet ouvrage marque une rupture décisive avec la tradition newtonienne, fondée sur l’analyse directe des forces et des trajectoires. Sans renier les lois de Newton, Lagrange en propose une reformulation radicalement nouvelle, reposant sur les principes d’optimisation hérités de l’optique de Fermat et du principe de moindre action énoncé par Maupertuis.
L’idée centrale de la mécanique analytique est de décrire l’évolution d’un système mécanique non plus à partir des forces qui s’exercent sur chaque particule, mais à partir de grandeurs globales, en particulier les énergies. Plutôt que d’écrire la dynamique sous la forme d’équations vectorielles reliant forces et accélérations, Lagrange introduit une fonction unique, appelée fonction lagrangienne (ou lagrangien), généralement notée :
\[L = T – V\ \]
Où \(T\ \)désigne l’énergie cinétique du système et \(V\ \)son énergie potentielle. Toute la dynamique est alors contenue dans cette seule fonction.
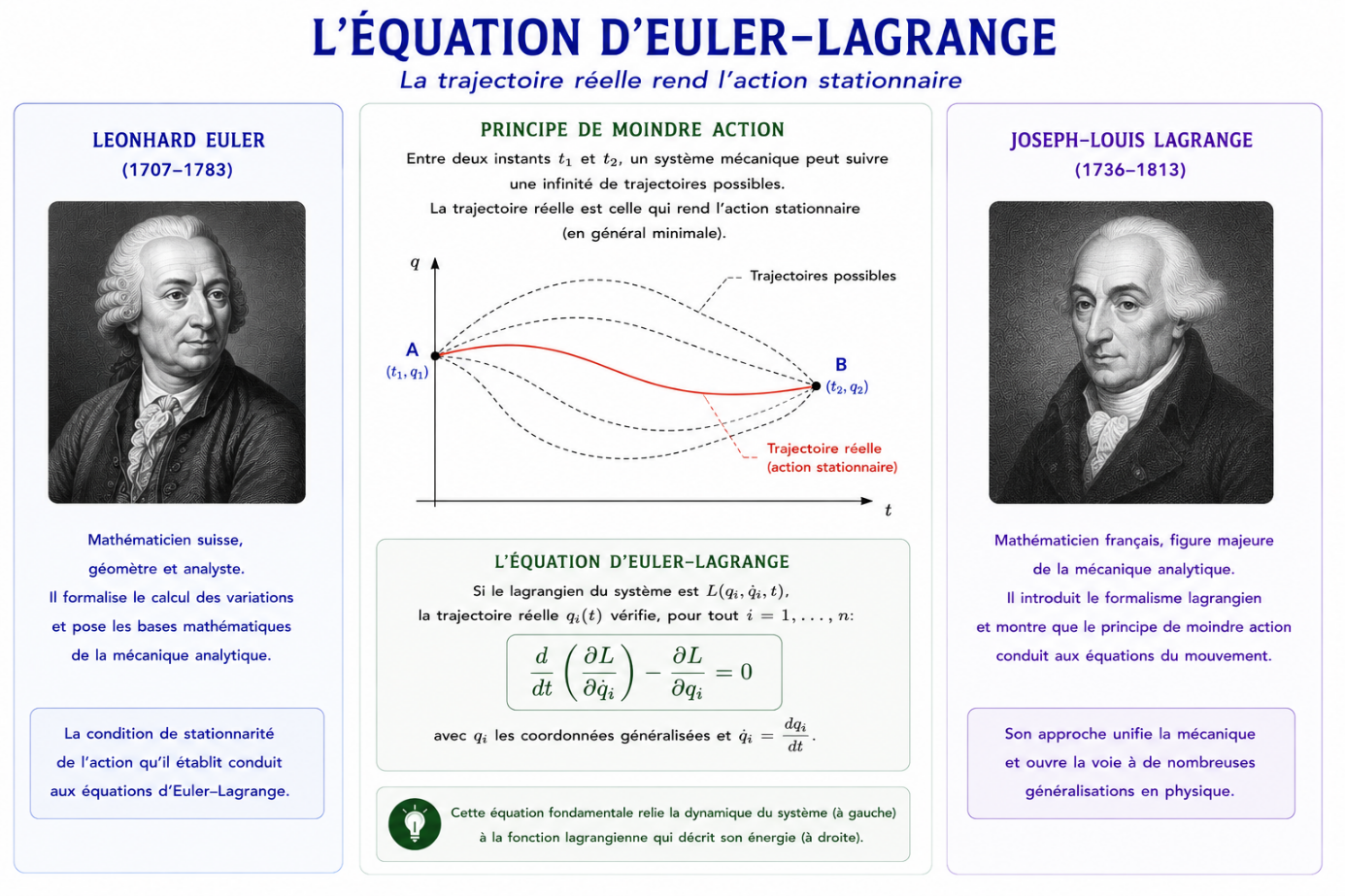
Les équations du mouvement ne sont plus postulées directement, mais déduites d’un principe variationnel : parmi toutes les trajectoires possibles reliant deux états donnés, la trajectoire réellement suivie par le système est celle qui rend extrémale (en pratique minimale) une quantité appelée action, définie comme l’intégrale du lagrangien au cours du temps. Cette idée prolonge directement le principe de Fermat en optique et le principe de moindre action de Maupertuis, mais elle en offre pour la première fois une formulation mathématique complète et opérationnelle.
De ce principe découlent les équations d’Euler-Lagrange, qui constituent le cœur de la mécanique analytique. Leur puissance réside dans leur généralité : elles s’appliquent aussi bien à une particule isolée qu’à des systèmes complexes comportant plusieurs degrés de liberté, des contraintes géométriques ou des interactions multiples. Des problèmes qui se révèlent lourds ou artificiels dans le cadre newtonien (comme les pendules composés, les systèmes articulés ou les mouvements sous contraintes) trouvent ici une formulation naturelle et unifiée.
Ce changement de point de vue, initialement motivé par des problèmes concrets comme celui de la brachistochrone, dépasse largement le cadre de la mécanique classique telle qu’elle était conçue au temps de Newton. Il introduit une nouvelle manière de penser les lois du mouvement, fondée sur des principes globaux d’optimisation plutôt que sur l’analyse locale des forces. La dynamique d’un système devient alors la conséquence d’une condition extrémale imposée à une grandeur unique, l’action, ce qui confère à la mécanique une structure formelle d’une grande élégance.
La mécanique analytique ne se limite pas à une reformulation technique : elle modifie profondément la hiérarchie des concepts physiques. Les notions d’énergie, de symétrie, de coordonnées généralisées et de contraintes y occupent une place centrale, tandis que les forces apparaissent comme des quantités dérivées plutôt que comme des objets premiers. Cette approche s’avère particulièrement puissante pour décrire des systèmes complexes, à plusieurs degrés de liberté, ou soumis à des contraintes géométriques, là où la mécanique newtonienne devient rapidement lourde et peu transparente.
L’œuvre de Lagrange sera prolongée et enrichie au 19ème siècle par William Hamilton, qui proposera une formulation encore plus abstraite et géométrique de la dynamique, fondée sur l’espace des phases et les variables conjuguées. Cette reformulation jouera un rôle décisif dans le développement ultérieur de la physique théorique, en particulier dans la mécanique quantique et la théorie des champs, où le langage variationnel devient omniprésent.
Dans cet article, nous retracerons la naissance et les fondements de la mécanique analytique, depuis ses racines dans les principes d’économie naturelle et de moindre action jusqu’à ses formulations lagrangienne et hamiltonienne, avant d’esquisser son extension aux systèmes continus et aux champs. Il s’agira moins d’entrer dans tous les détails techniques que de comprendre comment une nouvelle manière de penser la dynamique s’est progressivement imposée comme l’un des cadres conceptuels les plus profonds et les plus féconds de la physique moderne.
Les limites de la mécanique newtonienne
Publiée en 1687 dans les Philosophiæ Naturalis Principia Mathematica, la mécanique de Newton constitue l’un des édifices les plus solides et les plus universels de l’histoire des sciences. Fondée sur les notions de force, de masse et d’accélération, elle repose sur l’idée profondément novatrice que les mêmes lois gouvernent aussi bien les phénomènes terrestres que les mouvements célestes. La chute d’un corps, le mouvement d’un projectile, la trajectoire de la Lune ou celle des planètes obéissent à un unique ensemble de principes dynamiques. Cette universalité confère à la mécanique newtonienne une portée conceptuelle exceptionnelle et explique son succès immédiat et durable. Pendant plus d’un siècle, elle s’impose ainsi comme le paradigme dominant de la description du monde physique.
Cependant, malgré son succès empirique incontestable, la mécanique newtonienne présente plusieurs limites conceptuelles et pratiques qui apparaissent progressivement à mesure que les problèmes étudiés gagnent en complexité. Ces limites ne remettent pas en cause la validité des lois de Newton, mais révèlent les difficultés liées à leur mise en œuvre et à leur interprétation dans certaines situations.
La première limite tient au rôle central des forces. Dans la mécanique newtonienne, le mouvement d’un système est entièrement déterminé par l’inventaire des forces qui s’exercent sur chacun de ses constituants. Or, dans de nombreux systèmes physiques réels, cette description devient rapidement lourde. Les forces de contrainte, par exemple, ne sont pas toujours connues explicitement : réactions de supports, tensions de fils, forces de liaison entre les parties d’un système. Leur détermination nécessite souvent l’introduction de grandeurs auxiliaires qui compliquent considérablement l’analyse, sans apporter d’information physique directe sur le mouvement recherché.
Cette difficulté est particulièrement marquée pour les systèmes à plusieurs degrés de liberté. Lorsqu’un système est constitué de nombreuses particules liées entre elles, les équations de Newton doivent être écrites pour chacune d’elles, dans un repère donné, ce qui conduit à un grand nombre d’équations différentielles couplées. Même lorsque le mouvement global du système est simple, la description newtonienne reste encombrée par des variables inutiles et par des forces internes qui s’annulent au niveau macroscopique mais alourdissent le calcul.
Une autre limite importante réside dans le choix des coordonnées. La mécanique newtonienne privilégie implicitement les coordonnées cartésiennes et les repères inertiels. Or, de nombreux problèmes naturels s’expriment plus simplement dans des systèmes de coordonnées adaptés à la géométrie du mouvement : coordonnées polaires, cylindriques, sphériques, ou encore coordonnées définies par des contraintes géométriques. La reformulation des lois de Newton dans ces coordonnées non cartésiennes est possible, mais elle requiert des manipulations complexes et masque souvent la structure profonde du problème.
Sur le plan conceptuel, la mécanique newtonienne repose sur une causalité locale : à chaque instant, le mouvement d’un corps est déterminé par les forces qui s’exercent sur lui à cet instant précis. Cette vision, bien que parfaitement cohérente, contraste avec l’émergence progressive d’approches globales fondées sur des principes d’optimisation. Dès le 17ème siècle, le principe de Fermat en optique suggère que la nature peut être décrite comme choisissant, parmi toutes les trajectoires possibles, celle qui minimise une certaine grandeur. La mécanique newtonienne, dans sa formulation originelle, ne fait pas apparaître naturellement ce type de principe global.
Enfin, la mécanique newtonienne ne met pas explicitement en évidence le rôle des symétries et des grandeurs conservées. Bien que les lois de conservation de l’énergie, de la quantité de mouvement ou du moment cinétique puissent être déduites des équations de Newton, elles apparaissent comme des conséquences secondaires, et non comme des principes structurants. Cette absence de hiérarchie conceptuelle devient un frein lorsqu’on cherche à généraliser la mécanique à des systèmes plus abstraits ou à établir des correspondances profondes entre différentes théories physiques.
Ces limites ne constituent pas des faiblesses au sens strict, mais plutôt des signes de maturité d’une théorie arrivée à un stade où une reformulation devient souhaitable. C’est précisément pour répondre à ces difficultés que s’est développée, au 18ème siècle, la mécanique analytique. En s’affranchissant de la notion de force comme concept fondamental et en s’appuyant sur des principes variationnels globaux, elle offre un cadre plus général, plus souple et plus unificateur, sans contredire les résultats de Newton, mais en les dépassant conceptuellement.
Principes d’économie naturelle et de moindre action
L’idée selon laquelle la nature obéirait à un principe d’économie précède largement la formulation moderne de la mécanique analytique. Bien avant que les forces et les équations différentielles ne deviennent le langage privilégié de la physique, plusieurs savants avaient pressenti que les phénomènes naturels semblaient suivre des chemins « optimaux », comme si la nature choisissait parmi toutes les possibilités celle qui minimise une certaine grandeur globale. Cette intuition, longtemps formulée dans un cadre philosophique ou géométrique, va progressivement acquérir un statut scientifique avec le développement des principes variationnels.
Un premier exemple majeur apparaît en optique au 17ème siècle avec le principe d’économie naturelle de Pierre de Fermat. Cherchant à comprendre les lois de la réflexion et de la réfraction, Fermat propose que la lumière se propage entre deux points en un temps minimal. Ce principe permet non seulement de retrouver les lois empiriques de Snell-Descartes, mais aussi de les unifier sous une même idée directrice. Il marque une rupture conceptuelle importante : la trajectoire de la lumière n’est plus expliquée localement par des mécanismes ou des forces, mais globalement par une propriété d’optimalité portant sur l’ensemble du trajet. Pour la première fois, une loi physique est formulée comme la solution d’un problème de minimisation.
Cette manière de penser, d’abord limitée à l’optique, trouve un écho plus général au 18ème siècle dans le domaine de la mécanique. En 1744, Pierre-Louis Moreau de Maupertuis propose ce qu’il nomme le principe de moindre action. Selon lui, lorsque la nature produit un changement, la quantité d’action, nécessaire à ce changement, est la plus petite possible. Maupertuis définit l’action, dans un cadre encore imprécis, comme un produit impliquant la masse, la vitesse et la distance parcourue. Sa démarche s’inspire explicitement de celle de Fermat : parmi toutes les trajectoires possibles reliant deux états d’un système mécanique, la trajectoire réellement observée est celle qui minimise une certaine grandeur globale.
Chez Maupertuis, le principe de moindre action est encore fortement teinté de considérations métaphysiques. Il y voit une manifestation de l’ordre et de la sagesse de la nature, voire de la perfection divine. Cette dimension philosophique suscite des critiques, notamment de la part de Voltaire, mais elle n’empêche pas le principe d’exercer une influence profonde. Car, au-delà de son habillage métaphysique, l’idée centrale est d’une grande fécondité : les lois du mouvement pourraient être déduites non à partir des forces instantanées, mais à partir d’un principe global d’optimisation.
C’est précisément ce glissement conceptuel qui prépare l’émergence de la mécanique analytique. La question n’est plus seulement : « quelle force agit sur un corps à chaque instant ? », mais aussi : « quelle trajectoire rend extrémale une certaine quantité intégrée le long du mouvement ? ». Cette reformulation ouvre la voie à une description plus abstraite et plus générale de la dynamique, indépendante du choix des coordonnées et particulièrement adaptée aux systèmes complexes ou contraints.
Le principe de moindre action, tel qu’il sera reformulé et mathématisé par Euler, puis systématisé par Lagrange, devient ainsi un outil central de la physique théorique. Il ne remplace pas la mécanique newtonienne, mais en propose une lecture profondément différente : là où Newton décrit le mouvement comme la conséquence locale de forces, les principes variationnels décrivent le mouvement comme le résultat global d’une optimisation. C’est cette nouvelle manière de penser la dynamique, héritée du principe d’économie naturelle et du principe de moindre action, qui constitue le socle conceptuel de la mécanique analytique.
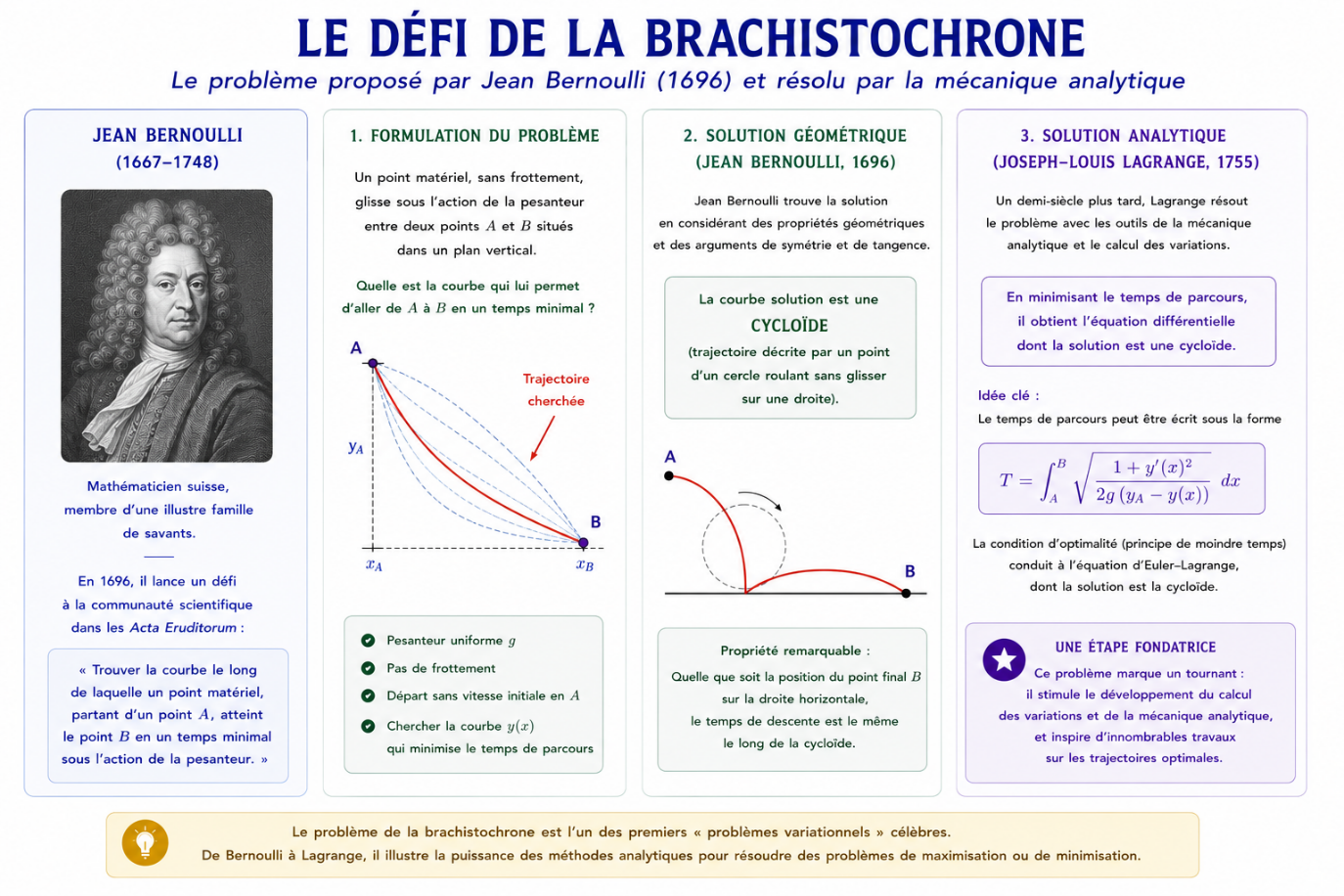
Le défi de la brachistochrone (Jean Bernoulli – 1696)
La mécanique analytique ne naît pas d’un besoin abstrait de reformulation mathématique, mais de la tentative de résoudre concrètement des problèmes où la notion d’optimisation joue un rôle central. Après l’émergence du principe d’économie naturelle en optique et du principe de moindre action en mécanique, une question devient incontournable : peut-on déterminer les lois du mouvement en cherchant non pas les forces instantanées, mais la trajectoire qui optimise une grandeur globale, comme le temps ou l’action ? C’est précisément cette question qui prend une forme spectaculaire à la fin du 17ème siècle avec le problème de la brachistochrone, posé par Jean Bernoulli. Ce défi mathématique et physique va servir de laboratoire conceptuel pour les principes variationnels et conduire, à terme, à l’élaboration du formalisme de la mécanique analytique par Lagrange, fondé sur des méthodes algébriques plutôt que géométriques.
En 1696, le mathématicien suisse Jean Bernoulli soumet ce problème de la brachistochrone à la communauté des mathématiciens. Le problème est le suivant : il faut trouver parmi toutes les courbes reliant deux points A et B celle le long de laquelle la particule de masse m, partant du point A et glissant le long de la courbe sous le seul effet de la gravitation arrive au point B en un temps le plus court possible. Le nom de brachistochrone provient du grec « brachistos » qui veut dire le plus court et « chronos » qui signifie temps.
Différentes solutions géométriques seront proposées très rapidement à ce problème par les frères Bernoulli, Leibniz, Newton et d’autres mathématiciens / physiciens. Certaines de ces solutions étaient fondées sur une analogie avec le principe d’économie naturelle de Fermat pour la propagation de la lumière.
Comme on l’a évoqué précédemment, il faudra attendre les travaux du mathématicien suisse Leonhard Euler en 1744 pour proposer un traitement un peu systématique de ce type de problème de recherche d’optimum. La démarche d’Euler sera dans un premier temps purement géométrique.
Dans l’encyclopédie méthodique de physique publiée en 1793, Gaspar Monge, jean-Dominique Cassini et Pierre Bertholon de Saint-Lazare évoquent les travaux d’Euler basé sur le principe de moindre action de Maupertuis : « Quantité d’action, est le nom que donne M. de Maupertuis, dans les Mémoires de l’Académie des Sciences de Paris, 1744, & dans ceux de l’académie de Berlin, 1746, au produit de la masse d’un corps par l’espace qu’il parcourt & par la vitesse. M. de Maupertuis a découvert cette loi générale, que dans les changements qui se font dans l’état d’un corps, la quantité d’action nécessaire pour produire ce changement, est la moindre qu’il est possible. Il a appliqué heureusement ce principe à la recherche des lois de la réfraction, des lois du choc, des lois de l’équilibre, et s’est même élevé à des conséquences plus sublimes sur l’existence d’un premier être. Les deux ouvrages de M. de Maupertuis que nous venons de citer, méritent toute l’attention des Philosophes ; & nous les exhortons à cette lecture : ils y verront que l’auteur a su allier la métaphysique des causes finales, avec les vérités fondamentales de la mécanique ; faire dépendre d’une même loi le choc des corps élastiques & celui des corps durs, qui jusqu’ici avoient eu des lois séparées, & réduire à un même principe les lois du mouvement & celles de l’équilibre.
Le premier mémoire où M. de Maupertuis a donné l’idée de son principe, est du 15 avril 1744 ; & à la fin de la même année, M. le Professeur Euler publia son excellent livre : Methodus inveniendi lineas curvas maximi vel minimi proprietate gaudentes. Dans le supplément qui y avait été ajouté, cet illustre géomètre démontre que dans les trajectoires que des corps décrivent par des forces centrales, la vitesse multipliée par l’élément de la courbe, fait toujours un minimum. Ce théorème est une belle application du principe de M. de Maupertuis au mouvement des planètes ».
Le mathématicien italien Joseph Lagrange découvrira la méthode d’Euler en 1754 et entamera une correspondance à distance avec Euler (Lagrange étant domicilié à Turin et Euler à Berlin) pour lui proposer une méthode algébrique de la recherche d’optimum d’une formule d’intégrale. Lagrange proposera ainsi en 1762 dans un article intitulé « Nouvelle méthode pour déterminer les maximas et les minimas des formules intégrales », une solution analytique basée sur ce qui sera le premier véritable calcul variationnel de l’histoire des mathématiques. Cette méthode pose les fondements du calcul variationnel moderne. Elle conduit directement à ce qu’on appelle aujourd’hui les équations d’Euler-Lagrange, qui permettent de déterminer les trajectoires physiques en minimisant l’action.
L’astronome et mathématicien Jean-Baptiste Delambre revient sur ces travaux de Lagrange dans ses « Notices sur la vie et les ouvrages de M. le comte J.L. Lagrange » publiées en 1867 : « Les premières tentatives pour déterminer le maximum et le minimum dans toutes les formules intégrales indéfinies avaient été faites à l’occasion de la courbe de la plus vite descente et des isopérimètres de Bernoulli. Euler les avait ramenées à une méthode générale, dans un ouvrage original, où brille partout une profonde science de calcul ; mais quelque ingénieuse que fût sa méthode, elle n’avait pas toute la simplicité qu’on peut désirer dans un ouvrage de pure analyse. L’auteur en convenait lui-même ; il croyait apercevoir la nécessité d’une démonstration indépendante de la Géométrie et de l’Analyse.
Dans un Appendice qui est à la fin du volume, et qui a pour titre : Du mouvement des projectiles dans un milieu non résistant, il paraît entièrement se défier des ressources de l’Analyse, et termine en disant : Si mon principe (c’est celui que Lagrange a nommé depuis le principe de la moindre action) n’est pas suffisamment démontré, comme cependant il est conforme à la vérité, je ne doute pas qu’au moyen des principes d’une saine métaphysique on ne puisse lui donner la plus grande évidence, et j’en laisse le soin à ceux qui font leur état de la métaphysique.
Cet appel, auquel n’ont pas répondu les métaphysiciens, fut entendu par Lagrange, dont il excita l’émulation. En peu de temps le jeune homme trouva la solution dont Euler avait désespéré, il la trouva par l’Analyse, et, en rendant compte de la voie qui l’avait conduit à cette découverte, il dit expressément, et pour répondre au doute d’Euler, qu’il la regarde, non comme un principe métaphysique, mais comme un résultat nécessaire des lois de la Mécanique, comme un simple corollaire d’une loi plus générale dont il a fait depuis la base de sa Mécanique analytique.
Cette noble émulation qui excitait à triompher des difficultés regardées comme insurmontables, à rectifier ou compléter les théories restées imparfaites, paraît avoir constamment dirigé M. Lagrange dans le choix de ses sujets ».
Le problème de la brachistochrone apparaît ainsi rétrospectivement comme bien plus qu’un exercice de virtuosité mathématique. Il constitue un moment charnière où se rencontrent une intuition physique profonde (l’idée que la nature optimise certaines grandeurs) et la nécessité d’un outil mathématique nouveau pour formaliser cette intuition. En répondant à l’appel laissé en suspens par Euler, Lagrange ne se contente pas d’améliorer une méthode existante : il change la nature même de la mécanique. Le mouvement n’est plus décrit comme la conséquence directe de forces appliquées point par point, mais comme le résultat global d’un principe variationnel, exprimé par une équation unique et générale. La brachistochrone joue ainsi le rôle de matrice conceptuelle de la mécanique analytique : c’est en cherchant la courbe de descente la plus rapide que se dessine la voie vers une formulation universelle de la dynamique, indépendante de toute construction géométrique particulière. Le passage du problème de la brachistochrone au formalisme lagrangien marque donc l’entrée définitive de la mécanique dans l’ère de l’analyse et de l’abstraction.
Parenthèse mathématique – La brachistochrone |
|---|
Formalisme lagrangien en mécanique classique (Lagrange – 1788)
Partant du problème de la brachistochrone, Lagrange, a l’idée d’introduire une formulation un peu plus générale d’un problème variationnel, qui consiste à trouver la fonction u qui minimise l’expression :
\[u \rightarrow F(u) = \int_{x_{A}}^{x_{B}}{\ L\ \left( u(x),\ u'(x) \right)\ dx\ où\ L\ est\ une\ fonction\ à\ deux\ }variables\ L(\alpha,\beta)\]
Dans cette expression, \(L\) est une fonction lagrangienne dépendant de \(u(x)\) et de sa dérivée \(u'(x)\), et éventuellement de la variable \(x\). Cette formulation permet de traiter des cas très divers, bien au-delà du seul problème de la brachistochrone.
Pour illustrer l’intérêt de cette généralisation, on va prendre un autre exemple qui est celui de la forme d’une corde pesante attachée à ses deux extrémités. Si on note y(x) une forme quelconque de la corde. Un élément de longueur a une expression identique à celle de la brachistochrone. Dans le problème de la corde pesante, il s’agit donc de minimiser l’énergie potentielle de la corde qui a pour expression :
\[V(y) = \int_{x_{A}}^{x_{B}}{\mu gy(x)\sqrt{1 + {y'(x)}^{2}}dx\ où\ \mu\ est\ la\ masse\ linéique\ de\ la\ corde}\]
C’est une fonctionnelle qui a bien le même type de dépendance en y et y’. Cette analogie confirme la pertinence du cadre variationnel général introduit par Lagrange. Repartons de l’expression générale de notre problème variationnel dans la parenthèse mathématique ci-dessous.
Parenthèse mathématique – L’équation d’Euler-Lagrange |
|---|
En 1762, Lagrange propose, dans un article intitulé Nouvelle méthode pour déterminer les maxima et minima des formules intégrales, une solution entièrement analytique aux problèmes variationnels. Cette méthode, inspirée des travaux d’Euler, conduit aux fameuses équations d’Euler-Lagrange, qui associent à toute fonctionnelle de la forme F[u] une équation différentielle permettant d’en trouver les extrema.
Lagrange n’exploitera pas immédiatement cette approche pour révolutionner la mécanique. Il consacrera les années 1770 à d’autres problèmes, notamment la mécanique céleste, et contribuera à l’étude du problème des trois corps (par exemple le mouvement combiné du soleil, de la terre et de la lune), introduisant à cette occasion les célèbres points de Lagrange.
C’est dans les années 1780, à Berlin, que Lagrange revient à la mécanique avec une approche profondément nouvelle. Il adopte une perspective proche de celle de Fermat en optique : au lieu de chercher comment un système évolue à partir de son état initial sous l’effet de forces (comme dans la mécanique newtonienne), il cherche quelle trajectoire est effectivement suivie entre deux états donnés, celle qui rend l’action minimale.
Son ouvrage majeur, la Mécanique analytique (1788) [1], systématise cette approche et jette les bases du formalisme lagrangien. Même si ce traité a été publié à son arrivée à Paris en 1788, il aura été essentiellement écrit lors de son séjour à Berlin qui aura été sa période la plus faste en termes de production mathématique. Il faut dire qu’un an après la publication de son ouvrage de référence, il se passera en France un évènement inattendu, qui impactera fortement les travaux scientifiques pendant quelques années.
Dans son traité de mécanique analytique, Lagrange utilise le principe de moindre action pour déterminer les trajectoires et états des systèmes physiques. Dans le formalisme qu’il proposera, qu’on appelle aujourd’hui le formalisme Lagrangien, on considère qu’un système physique peut être décrit par une fonction de Lagrange ou Lagrangien qui dépend des paramètres de position, de vitesse et du temps. Le Lagrangien est noté L, et les positions et vitesses sont traditionnellement notées respectivement \(q\) et \(\dot{q}\) (il s’agit de la notation associée aux coordonnées généralisées dont on parle un peu plus loin).
Pour essayer de comprendre un peu l’intérêt de cette démarche, il faut revenir à l’idée originelle de ce concept. En mécanique classique newtonienne, pour décrire l’évolution d’un système, on considère un solide ayant une position et une vitesse initiale, et on étudie sa trajectoire sous l’effet des forces auxquelles il est soumis, grâce à l’équation de Newton.
Dans l’approche de Lagrange, l’idée est de regarder les états initiaux et finaux du système caractérisés par leur position notée q à un instant t (respectivement (qi, ti) pour l’état initial et (qf, tf) pour l’état final). On imagine alors toutes les trajectoires possibles entre ces deux états, et le principe est de dire que la trajectoire effectivement suivie par le solide est celle qui minimise l’Action.
Toute la difficulté de compréhension initiale de ce concept est de savoir comment on caractérise le système pour décrire les trajectoires possibles et ce qu’on entend par Action. Dans le formalisme lagrangien ce qui caractérise les interactions du système c’est ce qu’on appelle la fonction de Lagrange ou le Lagrangien, et l’action est la sommation de ce Lagrangien le long d’une trajectoire possible du système.
Parenthèse mathématique – L’énergie potentielle en mécanique analytique |
|---|
Pour l’exemple simple d’un corps en mouvement dans un potentiel de pesanteur, l’application des équations d’Euler-Lagrange au Lagrangien descriptif de ce système conduit directement aux équations classiques de la mécanique newtonienne (masse * accélération = somme des forces). Ce qui est logique puisque c’est comme cela qu’on a construit le Lagrangien.
Sur la base de ce seul exemple on peut douter de l’intérêt de la démarche, les calculs étant plus compliqués que dans la formulation du mouvement par Newton, mais il est un fait que cette méthode variationnelle est d’une très grande richesse dans un grand nombre de domaines physiques (optique, thermodynamique, relativité générale, physique quantique).
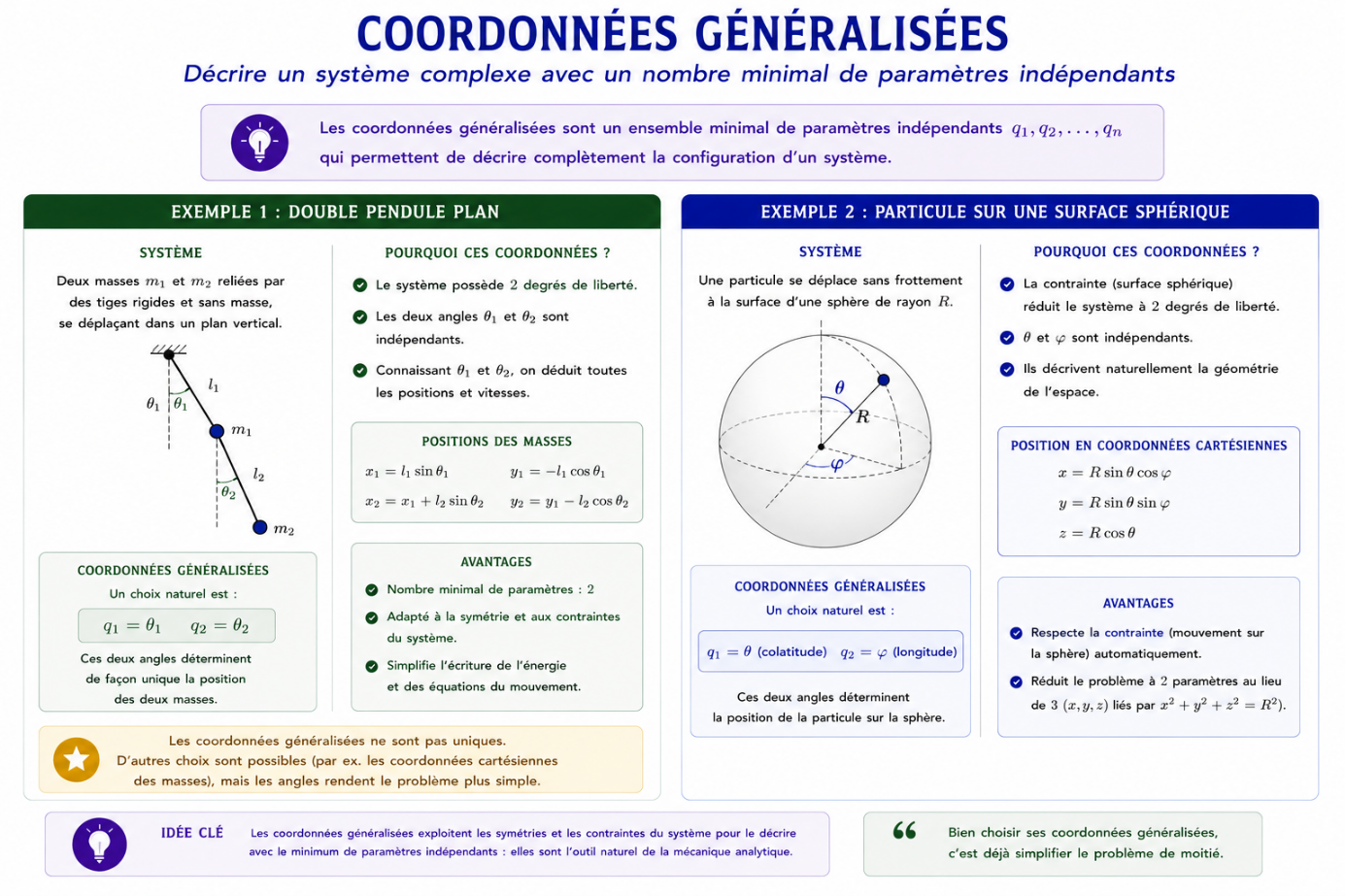
L’intérêt devient en particulier manifeste lorsque l’on considère un système avec plusieurs corps ou particules en interaction. Dans ces systèmes, il existe un nombre défini de degrés de liberté que l’on va noter \(l\). Ce nombre \(l\) est compris entre un et trois fois le nombre de corps / particules considérés, noté N (chaque corps / particule pouvant être caractérisé à minima par trois coordonnées dans l’espace).
Il existe alors \(l\) paramètres indépendants du système qui sont appelées les coordonnées généralisées du système et notées \(q_{k}.\) Par exemple, un double pendule possède deux degrés de liberté, et les coordonnées généralisées de ce système sont les angles que font chacune des barres avec la verticale. Chacune de ces coordonnées généralisées étant indépendantes l’une de l’autre, on peut appliquer l’équation d’Euler-Lagrange à chacune de ces coordonnées généralisées, ce qui simplifie énormément la résolution du problème. C’est tout l’intérêt de la mécanique analytique.
En synthèse, pour un objet en mouvement dans un potentiel V, le Lagrangien s’écrira comme la différence entre l’énergie cinétique et l’énergie potentielle. Cette formulation du Lagrangien découle directement de la prise en compte de la loi fondamentale de la dynamique énoncée par Newton un siècle plus tôt. Ce lagrangien prend la forme suivante :
\[L\left( q,\dot{q},t \right) = \ \frac{1}{2}m{\dot{q}}^{2} – V\left( q,\dot{q},t \right)\]
Pour toute trajectoire q(t) possible du système physique que l’on étudie, l’action est définie comme la sommation de ce Lagrangien le long d’un parcours possible du système.
\[\mathbf{S = \ }\int_{\mathbf{t}_{\mathbf{i}}}^{\mathbf{t}_{\mathbf{f}}}{\mathbf{L}\left( \mathbf{q,}\dot{\mathbf{q}}\mathbf{,t} \right)\mathbf{\ dt\ }}\]
La détermination du trajet effectivement suivi par le système se fait en appliquant le principe de moindre action : à points extremum fixés, temps de trajet fixé, on cherche le ou les trajets pour lesquels l’action est minimale par rapport aux variations possibles et infimes des trajets possibles.
Cette méthode variationnelle appliquée à l’action (on cherche le minimum de cette action) aboutit aux équations d’Euler-Lagrange qui donnent des trajets sur lesquels l’action est minimale.
\[\frac{\mathbf{d}}{\mathbf{dt}}\frac{\mathbf{\partial L}}{\mathbf{\partial}\dot{\mathbf{q}}}\left( \mathbf{q,}\dot{\mathbf{q}}\mathbf{,t} \right)\mathbf{- \ }\frac{\mathbf{\partial L}}{\mathbf{\partial q}}\left( \mathbf{q,}\dot{\mathbf{q}}\mathbf{,t} \right)\mathbf{= 0\ }\]
On va détailler dans la parenthèse mathématique ci-dessous la démarche proposée par Lagrange pour l’étude des N corps avec \(l\) degrés de liberté pour bien illustrer l’intérêt de la démarche.
Parenthèse mathématique – Les équations canoniques |
|---|
Symétries et lois de conservation
L’un des apports les plus profonds de la mécanique analytique est de révéler que certaines grandeurs physiques ne sont pas conservées par hasard, mais en raison de symétries fondamentales du système étudié. Là où la mécanique newtonienne constatait empiriquement la conservation de l’énergie, de la quantité de mouvement ou du moment cinétique, le formalisme lagrangien permet de comprendre ces invariances comme la conséquence directe de propriétés géométriques et structurelles du lagrangien.
Dans la mécanique analytique, toute l’information dynamique d’un système est contenue dans la fonction lagrangienne, qui dépend des coordonnées généralisées, de leurs vitesses et éventuellement du temps. Si cette fonction possède certaines invariances, alors les équations d’Euler-Lagrange impliquent immédiatement l’existence de quantités conservées au cours du mouvement. Ainsi, la notion de symétrie devient centrale : elle ne renvoie plus à une simple régularité visuelle ou géométrique, mais à une invariance des lois physiques sous certaines transformations.
Un premier exemple fondamental est l’homogénéité du temps. Si le lagrangien ne dépend pas explicitement du temps, c’est-à-dire si les lois du mouvement sont les mêmes aujourd’hui qu’hier ou demain, alors une grandeur particulière est conservée. Cette grandeur, qui se déduit naturellement des équations d’Euler-Lagrange, correspond à l’énergie mécanique du système. La conservation de l’énergie apparaît ainsi non comme un postulat indépendant, mais comme la conséquence directe du fait que les lois de la nature ne privilégient aucun instant particulier.
De manière analogue, l’homogénéité de l’espace conduit à la conservation de la quantité de mouvement. Si le lagrangien est invariant par translation spatiale, c’est-à-dire si le système ne distingue aucun point particulier de l’espace, alors le mouvement total est associé à une grandeur conservée. De même, l’isotropie de l’espace (l’absence de direction privilégiée) entraîne la conservation du moment cinétique. Ces résultats montrent que les lois de conservation fondamentales traduisent en réalité la structure même de l’espace et du temps dans lesquels les phénomènes physiques se déroulent.
Dans ce cadre, les coordonnées généralisées introduites par Lagrange jouent un rôle essentiel. Elles permettent de mettre en évidence les symétries même lorsque celles-ci sont masquées par la complexité des contraintes. Une coordonnée qui n’apparaît pas explicitement dans le lagrangien est dite cyclique, et la quantité conjuguée associée est alors conservée. Cette observation, simple en apparence, constitue un outil d’une puissance remarquable pour résoudre des systèmes mécaniques complexes.
Historiquement, ces liens profonds entre symétries et invariants du mouvement n’étaient pas encore formulés de manière pleinement explicite à l’époque de Lagrange. Ils apparaissent néanmoins en filigrane dans sa Mécanique analytique, où les intégrales premières du mouvement émergent naturellement du formalisme. Il faudra attendre le début du 20ème siècle, avec les travaux d’Emmy Noether, pour que cette correspondance soit érigée en un théorème général reliant rigoureusement toute symétrie continue d’une action à une loi de conservation. Ce théorème, bien que postérieur, révèle la portée conceptuelle exceptionnelle de la mécanique analytique.
Ainsi, la mécanique lagrangienne ne se contente pas de fournir une méthode élégante pour écrire les équations du mouvement. Elle dévoile une architecture profonde de la physique, dans laquelle les lois de conservation ne sont plus des faits isolés, mais les manifestations nécessaires de symétries fondamentales. Cette vision structurelle de la dynamique jouera un rôle décisif dans le développement du formalisme hamiltonien, où ces symétries s’exprimeront de manière encore plus géométrique, et où la notion d’espace des phases permettra de reformuler la dynamique en termes de transformations canoniques.
Formalisme Hamiltonien en mécanique classique (Hamilton – 1834)
Le formalisme développé par le mathématicien et physicien William Hamilton en 1834[2], souvent appelé formalisme canonique, constitue une reformulation élégante et puissante de la mécanique analytique de Lagrange. Si les équations qu’il propose étaient déjà esquissées par Lagrange lui-même dans l’édition de 1811 de la Mécanique analytique, Hamilton en clarifie la structure et l’interprétation.
Fait amusant, Lagrange utilisait déjà la lettre H pour désigner la somme de l’énergie cinétique et potentielle, non pas en référence à Hamilton (qui n’avait que six ans en 1811), mais en hommage à Christiaan Huygens. Historiquement, on aurait donc pu appeler cette fonction le Huygensien, mais c’est finalement à Carl Gustav Jacobi que l’on doit la diffusion du terme Hamiltonien.
William Hamilton décrit l’état d’un système par des variables q et p, moments conjugués dans l’espace des phases, et non plus par la position q et sa dérivée temporelle la vitesse (ou impulsion). Un espace des phases est un espace mathématique dans lequel tous les états possibles d’un système sont représentés à partir des coordonnées généralisées du système et de l’impulsion généralisée.
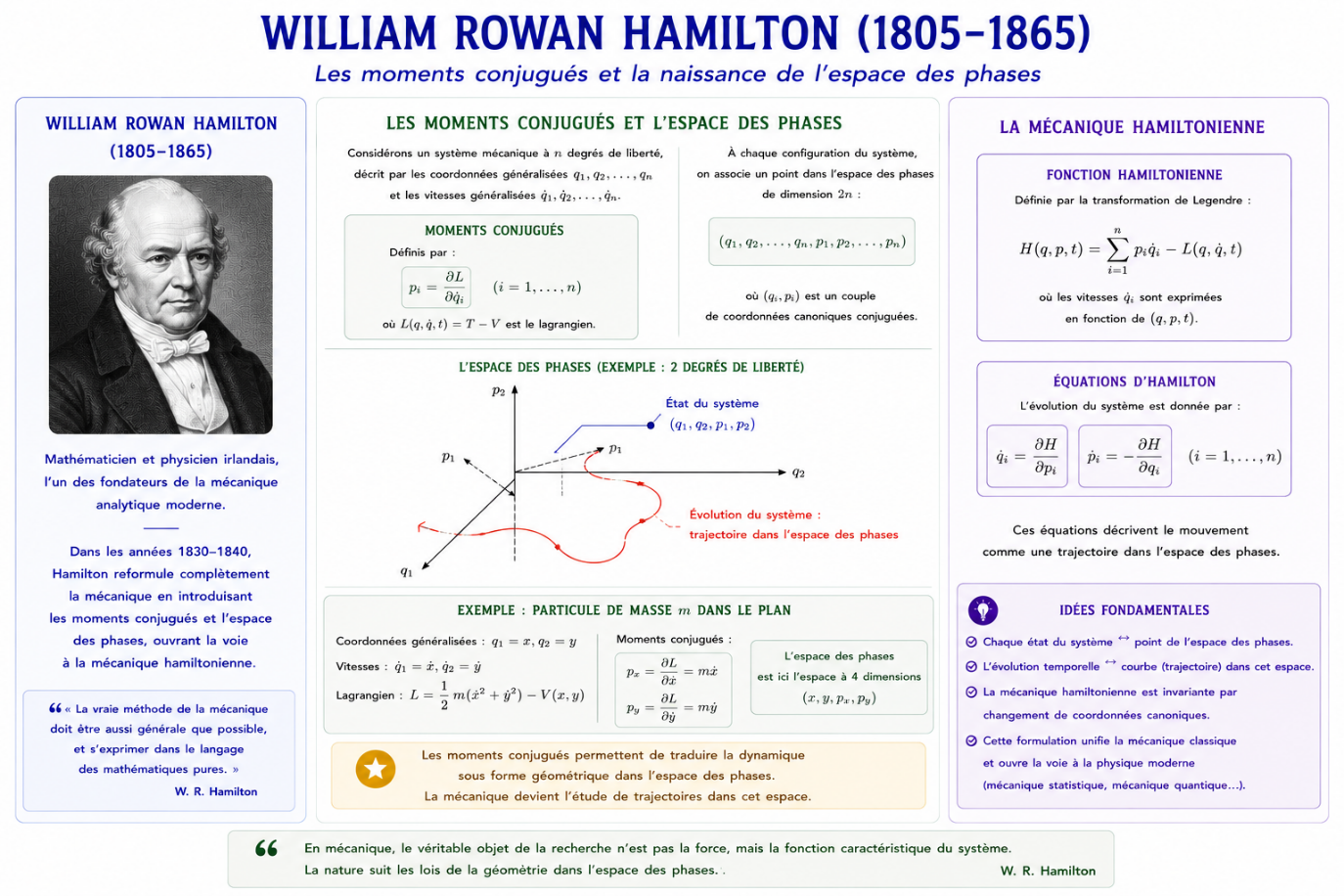
Chaque état possible correspondant à un point unique dans l’espace des phases. Pour les systèmes classiques, l’espace des phases se compose généralement de toutes les valeurs possibles des variables indépendantes de position et de quantité de mouvement. Dans cet espace de phase, la variable impulsion, que l’on nomme impulsion généralisée n’est pas la dérivée de la position, mais appartient à l’espace comprenant l’ensemble des impulsions possibles. A titre d’exemple, l’espace des phases d’une particule classique est de dimension six (trois pour la position et trois pour l’impulsion généralisée). Le moment conjugué, ou impulsion généralisée, notée p est relié à la coordonnée généralisée q par :
\[p_{i} = \frac{\partial L}{\partial{\dot{q}}^{i}}\]
L’Hamiltonien représentatif du système est défini à partir de la transformation de Legendre du Lagrangien :
\[H\left( q_{i},p_{i},t \right) = \sum_{k}^{}{{\dot{q}}_{k}p_{k}} – L\left( q_{i},{\dot{q}}_{i},t \right)\]
A titre d’exemple, pour un objet en mouvement dans un potentiel V, l’Hamiltonien s’écrira alors comme la somme entre l’énergie cinétique et l’énergie potentielle. On retrouve au travers de l’Hamiltonien l’énergie totale du système. L’application du principe de moindre action suivant le formalisme de Lagrange conduit aux équations canoniques d’Hamilton qui avaient été proposées par Lagrange dès 1811 :
\[{\dot{\mathbf{q}}}_{\mathbf{i}}\mathbf{=}\frac{\mathbf{\partial H}}{\mathbf{\partial}\mathbf{p}_{\mathbf{i}}}\mathbf{\ \ \ \ ;\ \ \ }{\dot{\mathbf{p}}}_{\mathbf{i}}\mathbf{= -}\frac{\mathbf{\partial H}}{\mathbf{\partial}\mathbf{q}_{\mathbf{i}}}\mathbf{\ }\]
En passant de la description lagrangienne à la description hamiltonienne, on remplace donc une équation différentielle du deuxième ordre par deux équations différentielles du premier ordre. La structure particulière avec un signe « − » dans la deuxième équation est appelée symétrie symplectique, et elle joue un rôle central en mécanique moderne.
En mécanique hamiltonienne, pour symétriser les équations, il faut introduire une équation antisymétrique. Hamilton s’intéresse au crochet de Poisson de deux fonctions \(f\) et \(g\) (noté : \(\left\{ f,g \right\}\)) défini par :
\[\left\{ f,g \right\} = \sum_{i}^{}{\ \left\lbrack \frac{\partial f}{\partial q_{i}}\frac{\partial g}{\partial p_{i}} – \frac{\partial f}{\partial p_{i}}\frac{\partial g}{\partial q_{i}} \right\rbrack}\]
Si on considère une grandeur physique \(f\) représentative du système physique considéré, en utilisant les équations d’Hamilton on peut démontrer que l’évolution temporelle de cette fonction est régie par l’Hamiltonien suivant la relation (cf. parenthèse mathématique) :
\[\frac{\mathbf{df}}{\mathbf{dt}}\mathbf{=}\left\{ \mathbf{H,f} \right\}\mathbf{+}\frac{\mathbf{\partial f}}{\mathbf{\partial t}}\]
Dans ce formalisme canonique, l’Hamiltonien gouverne l’évolution dans le temps du système. C’est un point que l’on retrouve dans toute la théorie quantique, et en particulier dans l’équation de Dirac.
Bien que reposant sur le même principe fondamental, le principe de moindre action , les deux formalismes diffèrent par leur perspective. Le formalisme lagrangien travaille dans l’espace des trajectoires et utilise des équations du second ordre. Le formalisme hamiltonien travaille dans l’espace des phases et produit des équations du premier ordre, souvent plus simples à manipuler pour des systèmes complexes.
Le choix entre les deux dépend du problème physique considéré. En mécanique classique, la méthode de Lagrange est souvent préférée pour les systèmes avec contraintes, tandis que l’approche de Hamilton s’avère plus puissante dans le traitement des symétries, de la conservation de l’énergie, et dans la transition vers la mécanique quantique.
Parenthèse mathématique – L’équation fondamentale de la dynamique |
|---|
Lagrange et Hamilton ont profondément transformé notre manière de penser la mécanique. En formulant les lois du mouvement à partir d’un principe variationnel, celui de moindre action, ils ont permis de dépasser l’approche newtonienne fondée uniquement sur les forces, au profit d’une vision plus unifiée et plus abstraite de la dynamique.
Le formalisme lagrangien a permis d’exprimer les équations du mouvement pour des systèmes complexes, même en présence de contraintes, à l’aide d’un cadre mathématique souple fondé sur les coordonnées généralisées. Le formalisme hamiltonien, en réorganisant les équations autour de l’énergie du système et de l’espace des phases, a quant à lui ouvert la voie à une compréhension plus fine de la structure sous-jacente des systèmes dynamiques, notamment à travers les notions de symétrie, de conservation, et d’évolution temporelle.
Mais ces deux approches, aussi puissantes soient-elles, restent encore limitées à la mécanique des systèmes discrets : particules, solides, pendules… Or, les grandes théories physiques du 20ème siècle, la relativité générale et la théorie quantique des champs notamment, exigent une généralisation à des systèmes continus, où les grandeurs dynamiques dépendent non plus seulement du temps, mais de l’espace et du temps.
Cette extension naturelle du formalisme lagrangien au cadre des champs constitue l’objet du chapitre suivant. Nous y verrons comment la même logique variationnelle, appliquée non plus à des trajectoires mais à des distributions spatiales, permet d’unifier les lois fondamentales de la physique moderne.
Formalisme lagrangien appliqué aux champs
Le formalisme lagrangien, que nous avons vu appliqué à des systèmes ponctuels ou à un nombre fini de degrés de liberté, peut être naturellement généralisé aux systèmes qui possèdent une infinité de degrés de liberté. C’est le cas en particulier des théories classiques des champs, dans lesquelles la variable dynamique n’est plus une position ou une vitesse, mais une fonction de l’espace et du temps, que l’on appelle un champ.
Un champ, noté en général φ(x), peut être interprété comme la limite continue d’un ensemble infini de coordonnées discrètes. Il associe à chaque point de l’espace-temps une valeur physique : par exemple, un champ scalaire comme la température, un champ vectoriel comme le champ électrique, ou un champ de spin plus complexe comme ceux utilisés en physique quantique.
Dans ce cadre, le Lagrangien est remplacé par une densité lagrangienne fonction du champ et de sa dérivée. La variable du temps est remplacée par un événement dans l’espace-temps. Pour le reste la théorie s’énonce de la même façon que pour la théorie classique de la mécanique lagrangienne.
Ainsi, dans la théorie des champs, l’action est définie par l’intégrale de la densité spatiale lagrangienne (on intègre la densité de Lagrangien, non seulement sur le temps, mais également dans l’espace) :
\[S\ \left\lbrack \varphi,\partial_{\mu}\varphi \right\rbrack = \int_{}^{}{L\ \left( \varphi,\partial_{\mu}\varphi \right)\ d^{4}x}\]
Le principe de moindre action reste inchangé dans son esprit : la dynamique du champ est déterminée par la condition que cette action soit stationnaire vis-à-vis de variations infinitésimales du champ. Les équations d’Euler-Lagrange en théorie des champs qui dérivent de ce principe de moindre action s’écrivent alors de la façon suivante :
\[\frac{\delta S}{\delta\varphi} = \frac{\partial L}{\partial\varphi} – \partial_{\mu}\left( \frac{\partial L}{\partial\left( \partial_{\mu}\varphi \right)} \right) = 0\]
Comme pour les coordonnées classiques, on peut introduire le moment conjugué du champ, ainsi que les crochets de Poisson de deux champs.
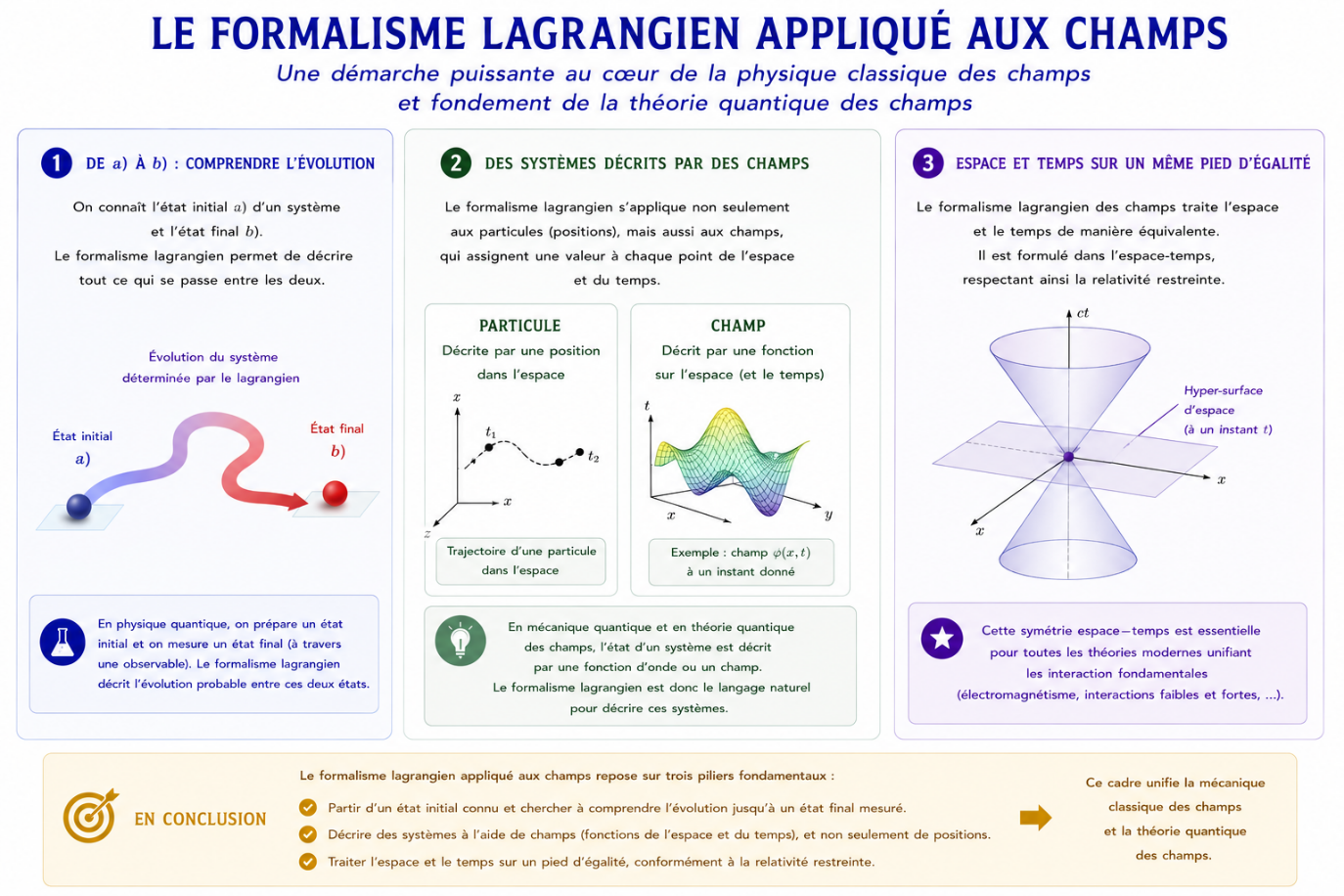
L’une des motivations du développement du formalisme lagrangien sur les champs, et plus généralement de la théorie classique des champs, est de fournir une base mathématique pour la théorie quantique des champs. On peut retenir en conclusion les trois principes essentiels de la démarche lagrangienne, qui en font tout l’intérêt en physique quantique :
- Dans cette démarche on part d’un état a) pour aboutir à un état b) connus, et on cherche à comprendre ce qui s’est passé entre les deux états. C’est un peu la démarche générale des expérimentations en physique quantique, où la seule chose que l’on peut appréhender c’est l’état final d’un système à travers une observable, en partant d’un état initial a priori connu ;
- La démarche de Lagrange est applicable, comme on vient le voir, à des systèmes qui sont décrits par un champ, et pas seulement à des systèmes décrits par une position dans l’espace euclidien. Or c’est justement le principe de description des systèmes quantiques, où l’on décrit un système à l’aide d’une fonction d’onde, ou plus généralement à l’aide d’un champ.
- Dans ce formalisme des champs, on peut également concevoir les dimensions de temps et d’espace de façon équivalente, ce qui permet de prendre en compte la relativité restreinte. Cette propriété est cruciale pour toutes les théories modernes unifiant les interactions fondamentales.
Parenthèse mathématique – Formalisme Lagrangien en théorie des champs |
|---|
Le formalisme lagrangien que nous avons étendu aux champs, c’est-à-dire à des systèmes possédant une infinité de degrés de liberté, constitue bien plus qu’un simple prolongement de la mécanique classique : il devient le langage naturel de la physique moderne.
En décrivant un système par une densité lagrangienne qui dépend du champ et de ses dérivées par rapport aux coordonnées d’espace-temps, on adopte une formulation qui respecte les principes de relativité restreinte (l’espace et le temps y sont traités de manière symétrique), met en valeur les symétries fondamentales de la nature, et ouvre la voie à une quantification rigoureuse de champs dynamiques, qu’ils soient scalaires, vectoriels ou spinoriels.
L’action, définie comme une intégrale sur l’espace-temps, reste au cœur de la dynamique : c’est elle qui dicte l’évolution du système, selon le principe de moindre action. Et les équations d’Euler-Lagrange, désormais écrites pour des champs, conservent leur rôle fondamental de prescription des lois d’évolution.
Ce formalisme prend tout son sens dans le contexte de la théorie quantique des champs : celle-ci cherche à quantifier non plus des particules isolées, mais les champs eux-mêmes. Et c’est précisément cette transition, de la description classique continue d’un champ à sa version quantique, que permet d’opérer la quantification canonique.
Nous sommes donc prêts à franchir une nouvelle étape : celle où le champ devient opérateur, où ses valeurs deviennent probabilistes, et où l’interprétation des phénomènes quantiques passe par une relecture profonde du concept même de particule. C’est un des points que l’on abordera dans le chapitre sur la transition entre la mécanique quantique et la théorie quantique des champs. Mais avant cela on va maintenant se plonger dans l’autre pilier conceptuel de la théorie quantique des champs, celui des symétries, et en particulier des symétries locales de jauge.
Conclusion
La mécanique analytique marque l’un des tournants conceptuels les plus profonds de l’histoire de la physique. En substituant aux forces et aux trajectoires une description fondée sur l’action, l’énergie et les symétries, elle transforme la manière même dont on conçoit les lois du mouvement. Ce changement de point de vue, amorcé par les principes d’économie naturelle de Fermat et de Maupertuis, puis formalisé avec rigueur par Euler, trouve son expression la plus aboutie dans l’œuvre de Lagrange. La dynamique cesse alors d’être une collection de problèmes particuliers pour devenir une théorie unifiée, fondée sur des principes généraux et abstraits.
Le formalisme lagrangien révèle que les équations du mouvement peuvent être déduites d’un unique objet mathématique, le lagrangien, à partir d’un principe variationnel simple et universel. Il met en lumière le rôle central des symétries et explique les lois de conservation comme des conséquences nécessaires de l’invariance des lois physiques. Cette approche ne se contente pas de simplifier les calculs : elle dévoile la structure profonde de la mécanique classique et en clarifie les fondements conceptuels.
La reformulation hamiltonienne prolonge cette évolution en introduisant l’espace des phases et une géométrie nouvelle de la dynamique. Elle offre une vision encore plus symétrique du temps et de l’espace, prépare la transition vers la mécanique quantique et rend explicite le lien entre dynamique classique et structures algébriques. À travers elle, la mécanique analytique s’affirme comme un langage universel, capable de s’adapter à des contextes physiques très divers.
L’extension du formalisme lagrangien aux théories des champs constitue l’aboutissement naturel de cette démarche. En généralisant le principe de moindre action à des systèmes possédant une infinité de degrés de liberté, la mécanique analytique devient le socle de la physique moderne. Elle permet de traiter sur un pied d’égalité l’espace et le temps, de mettre en évidence les symétries fondamentales de la nature, et de préparer la quantification des champs, étape indispensable à la compréhension des interactions fondamentales.
Ainsi, la mécanique analytique dépasse largement le cadre de la mécanique classique pour devenir un principe organisateur de la physique théorique. Elle ne décrit pas seulement comment les systèmes évoluent, mais pourquoi leurs lois prennent la forme qu’elles ont. En plaçant l’action au cœur de la dynamique, elle ouvre une voie qui conduit naturellement à la mécanique quantique, à la théorie quantique des champs et aux théories contemporaines des interactions fondamentales. Plus qu’un formalisme, elle constitue une manière de penser la nature, où la recherche d’invariance, de symétrie et d’économie devient le fil conducteur de la compréhension du monde physique.