Dans les développements précédents, nous avons vu que la mécanique analytique repose sur un principe variationnel, conduisant aux équations d’Euler-Lagrange, et que la dynamique d’un système peut être entièrement décrite à partir d’un Lagrangien. Une question fondamentale se pose alors : existe-t-il un lien profond entre les propriétés de symétrie d’un système physique et les lois de conservation observées expérimentalement ?
Cette question trouve une réponse remarquable dans un résultat majeur du 20ème siècle, dû à Emmy Noether. Le théorème de Noether établit un lien précis et général entre les symétries continues d’un système et l’existence de quantités conservées. Plus précisément, il affirme que toute invariance du Lagrangien par rapport à une transformation continue dépendant d’un paramètre implique l’existence d’un invariant du mouvement.
Il est important d’insister sur le fait qu’il s’agit d’un véritable théorème mathématique, et non d’un simple principe heuristique. Comme tout théorème, il repose sur des hypothèses précises, en particulier l’invariance de l’action sous une transformation continue, et conduit, par un raisonnement rigoureux, à une conclusion bien définie : l’existence d’une quantité conservée. La démonstration de ce résultat s’inscrit naturellement dans le cadre du calcul variationnel et repose sur les équations d’Euler-Lagrange.
L’objectif de cet article est de présenter cette démonstration dans le cadre de la mécanique analytique, puis d’illustrer le théorème à travers trois exemples fondamentaux : l’invariance par translation dans l’espace, qui conduit à la conservation de l’impulsion ; l’invariance par rotation, qui conduit à la conservation du moment cinétique ; et enfin l’invariance par translation dans le temps, qui conduit à la conservation de l’énergie. Ces résultats, qui apparaissent souvent comme indépendants, se révèlent ainsi comme des manifestations d’un principe unificateur profond.
Démonstration du théorème de Noether
On considère un système décrit par un lagrangien. L’action du système est l’intégrale du Lagrangien,
\[S = \ \int_{t_{i}}^{t_{f}}{L\left( q_{k},\dot{q_{k}},t \right)\ dt\ avec\ q_{k},\dot{q_{k}}\ les\ coordonnées\ généralisées\ }\]
Le comportement de l’objet physique étudié est défini en minimisant l’action, ce qui conduit aux équations d’Euler-Lagrange. En coordonnées généralisées on peut écrire ces équations pour chaque degré de liberté du système :
\[\frac{d}{dt}\frac{\partial L}{\partial\dot{q_{k}}}\left( q_{k},\dot{q_{k}},t \right) – \ \frac{\partial L}{\partial q_{k}}\left( q_{k},\dot{q_{k}},t \right) = 0\ pour\ tout\ 1 \leq k \leq l\ \]
Considérons maintenant une famille de transformation continue des coordonnées généralisées qui dépend de façon continue d’un paramètre que l’on notera α. Cette transformation s’apparente à un changement de variable que l’on peut exprimer sous la forme :
\[{Transformation\ :q}_{k}(t) \rightarrow Q_{k}(\alpha,t)\ avec\ Q_{k}(0,t) = q_{k}(t)\]
Cette transformation est une symétrie du lagrangien si le lagrangien est le même pour toute transformation de coordonnées généralisées. Ce qu’on peut traduire mathématiquement par la condition suivante :
\[\frac{d}{d\alpha}\ L\left( Q_{k}(\alpha,t),\ {\dot{Q}}_{k}(\alpha,t),\ t \right) = 0\]
En différenciant le lagrangien, et en considérant que le lagrangien ne dépend pas du paramètre α, on obtient :
\[\frac{dL}{d\alpha} = \sum_{k}^{}{\ \frac{\partial L}{\partial Q_{k}(\alpha)}\frac{\partial Q_{k}(\alpha)}{\partial\alpha} + \frac{\partial L}{\partial{\dot{Q}}_{k}(\alpha)}\frac{\partial{\dot{Q}}_{k}(\alpha)}{\partial\alpha}}\]
Cette équation est valable en tout point α, et en particulier en α=0, c’est à dire quand la coordonnée généralisée \(Q_{k}\) vaut \(q_{k}\). On a donc notamment :
\[\frac{dL}{d\alpha}(\alpha = 0) = \sum_{k}^{}{\left( \frac{\partial L}{\partial q_{k}}\frac{\partial Q_{k}}{\partial\alpha}(\alpha = 0) + \frac{\partial L}{\partial{\dot{q}}_{k}}\frac{\partial{\dot{Q}}_{k}}{\partial\alpha}(\alpha = 0) \right)\ = 0}\]
En introduisant l’équation d’Euler-Lagrange pour chacun des termes, on peut réécrire cela sous la forme :
\[\frac{dL}{d\alpha}(\alpha = 0) = \sum_{k}^{}\left( \frac{d}{dt}\left( \frac{\partial L}{\partial{\dot{q}}_{k}} \right)\frac{\partial Q_{k}}{\partial\alpha}(\alpha = 0) + \frac{\partial L}{\partial{\dot{q}}_{k}}\frac{\partial{\dot{Q}}_{k}}{\partial\alpha}(\alpha = 0) \right) = 0\]
D’où on tire :
\[\frac{d}{dt}\left( \sum_{k}^{}\left( \frac{\partial L}{\partial{\dot{q}}_{k}} \right)\frac{\partial Q_{k}}{\partial\alpha}(\alpha = 0) \right)\ = 0\]
Et on en déduit que la quantité suivante notée \(\mathbf{I}\) (pour invariant), est une constante indépendante du temps.
\[\mathbf{I =}\sum_{\mathbf{k}}^{}\left( \frac{\mathbf{\partial L}}{\mathbf{\partial}{\dot{\mathbf{q}}}_{\mathbf{k}}} \right)\mathbf{\ }\frac{\mathbf{\partial}\mathbf{Q}_{\mathbf{k}}}{\mathbf{\partial\alpha}}\left( \mathbf{\alpha = 0} \right)\]
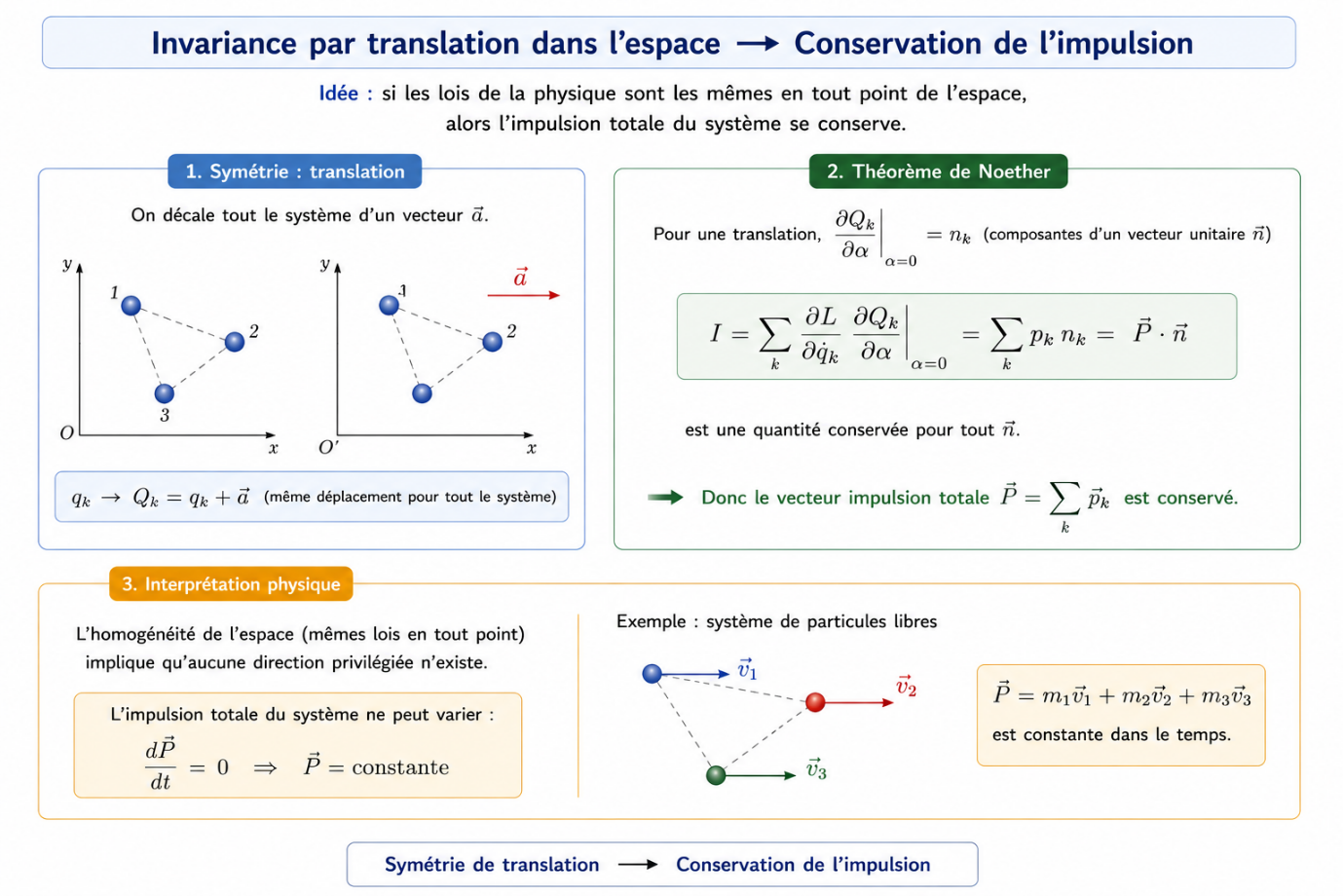
Invariance par translation : conservation de l’impulsion
Pour illustrer ce théorème, on va prendre les exemples des deux principales transformations applicables à un système, les translations et les rotations. Commençons par l’exemple de l’invariance par translation dans l’espace du lagrangien d’un système constitué d’une particule libre. Cette translation dans l’espace associe à la coordonnée \(q_{k}\) une coordonnée \(Q_{k}\), de telle façon que :
\[Q_{k}(\alpha) = q_{k} + \ \alpha\ \overrightarrow{n}\ avec\overrightarrow{\ n}\ un\ vecteur\ unitaire\ de\ direction\ quelconque\ \]
En application du théorème de Noether, la quantité \(I\) introduite précédemment est invariante. Par ailleurs l’impulsion généralisée \(\mathbf{p}_{\mathbf{k}}\) est reliée au lagrangien par la relation :
\[p_{k} = \frac{\partial L}{\partial{\dot{q}}_{k}}\]
On en déduit donc que la somme des impulsions généralisées, c’est-à-dire l’impulsion totale du système est invariante par translation. La conservation de l’impulsion totale d’un système provient donc de l’invariance du lagrangien par translation dans l’espace, c’est-à-dire de la caractéristique d’homogénéité de l’espace.
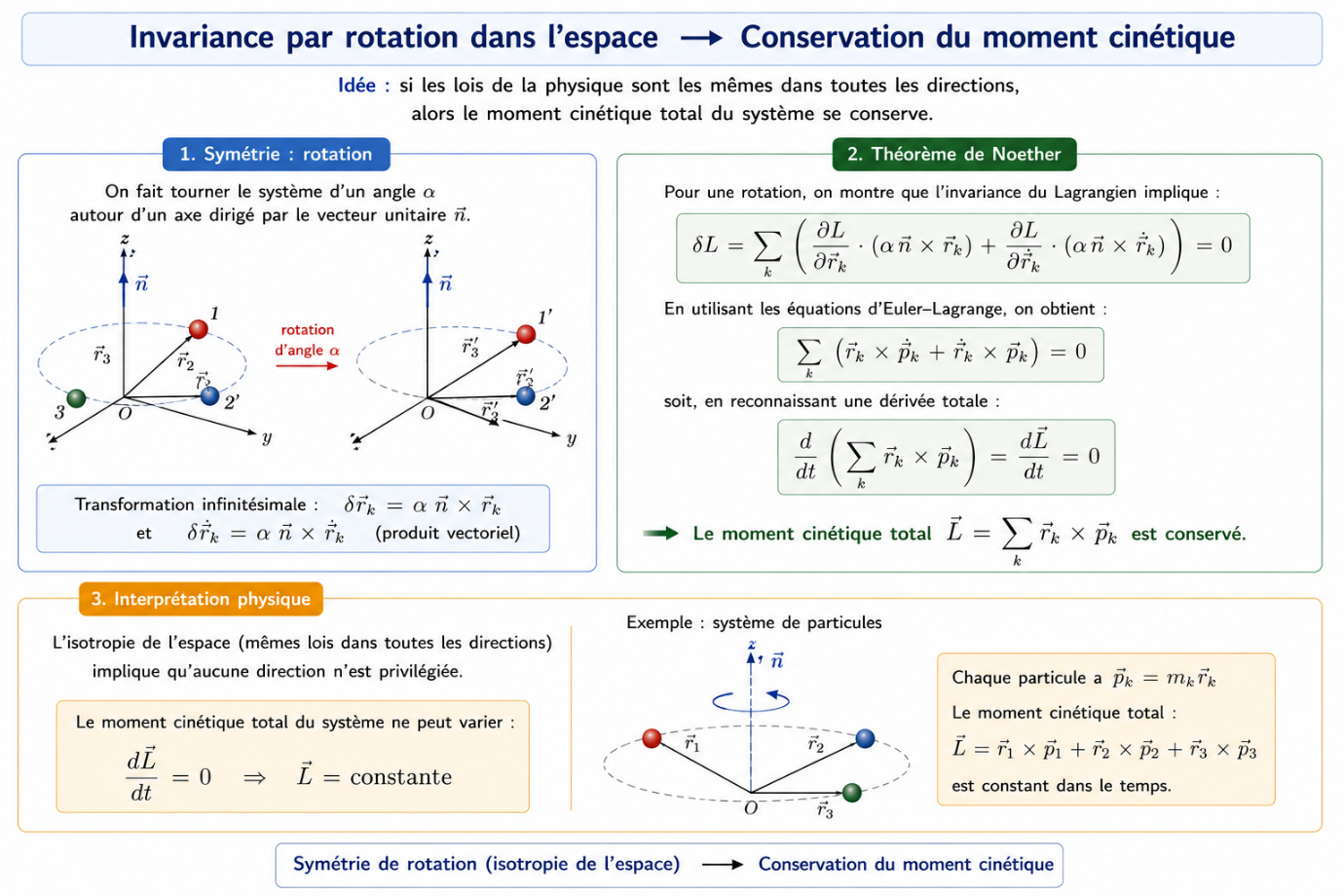
Invariance par rotation : conservation du moment cinétique
Abordons maintenant le deuxième exemple, celui des invariances par rotation. Une rotation d’un angle \(\alpha\) autour d’un axe de rotation porté par le vecteur unitaire \(\overrightarrow{\ n}\ \) transforme les positions \(r_{k}\ \)et les vitesses \({\dot{r}}_{k}\) suivant les formules suivantes :
\[r_{k} \rightarrow r_{k} + \alpha\ \overrightarrow{\ n}\ \times r_{k}\ \ \ \ \ \ et\ {\dot{r}}_{k} \rightarrow \ {\dot{r}}_{k} + \alpha\ \overrightarrow{\ n}\ \times \ {\dot{r}}_{k}\ où\ \times est\ le\ produit\ vectoriel\ \]
La variation du lagrangien s’exprime alors par :
\[\ \ \delta L = \sum_{k}^{}\left( \ \frac{\partial L}{\partial r_{k}} \bullet \left( \alpha\ \overrightarrow{\ n}\ \times \ r_{k}\ \right) + \frac{\partial L}{\partial{\dot{r}}_{k}} \bullet \left( \alpha\ \overrightarrow{\ n}\ \times \ {\dot{r}}_{k}\ \right) \right)\]
Comme précédemment, on introduit les moments conjugués et leurs dérivées, et on obtient :
\[\delta L = \sum_{k}^{}\left( \ {\dot{p}}_{k} \bullet \left( \alpha\ \overrightarrow{\ n}\ \times \ r_{k}\ \right) + p_{k} \bullet \left( \alpha\ \overrightarrow{\ n}\ \times \ {\dot{r}}_{k}\ \right) \right)\]
Comme il y a invariance par rotation la quantité \(\delta L\) doit être nulle pour toutes les rotations, c’est-à-dire pour toutes les valeurs de \(\alpha\ \overrightarrow{\ n}\). On en déduit que :
\[\sum_{k}^{}{\left( r_{k}\ \times \ {\dot{p}}_{k} + {{\dot{r}}_{k} \times p}_{k} \right) = 0}\]
Ce qu’on peut réécrire :
\[\frac{d}{dt}\left( \sum_{k}^{}\left( r_{k}\ \times \ p_{k} \right) \right) = \frac{d}{dt}\left( \sum_{k}^{}L_{k} \right) = \frac{d}{dt}L = 0\ avec\ L\ le\ moment\ cinétique\]
On en déduit donc que la somme des moments cinétiques, c’est-à-dire le moment cinétique total du système est invariant par rotation. La conservation du moment cinétique total d’un système provient donc de l’invariance du lagrangien par rotation dans l’espace, c’est-à-dire de la caractéristique d’isotropie de l’espace.
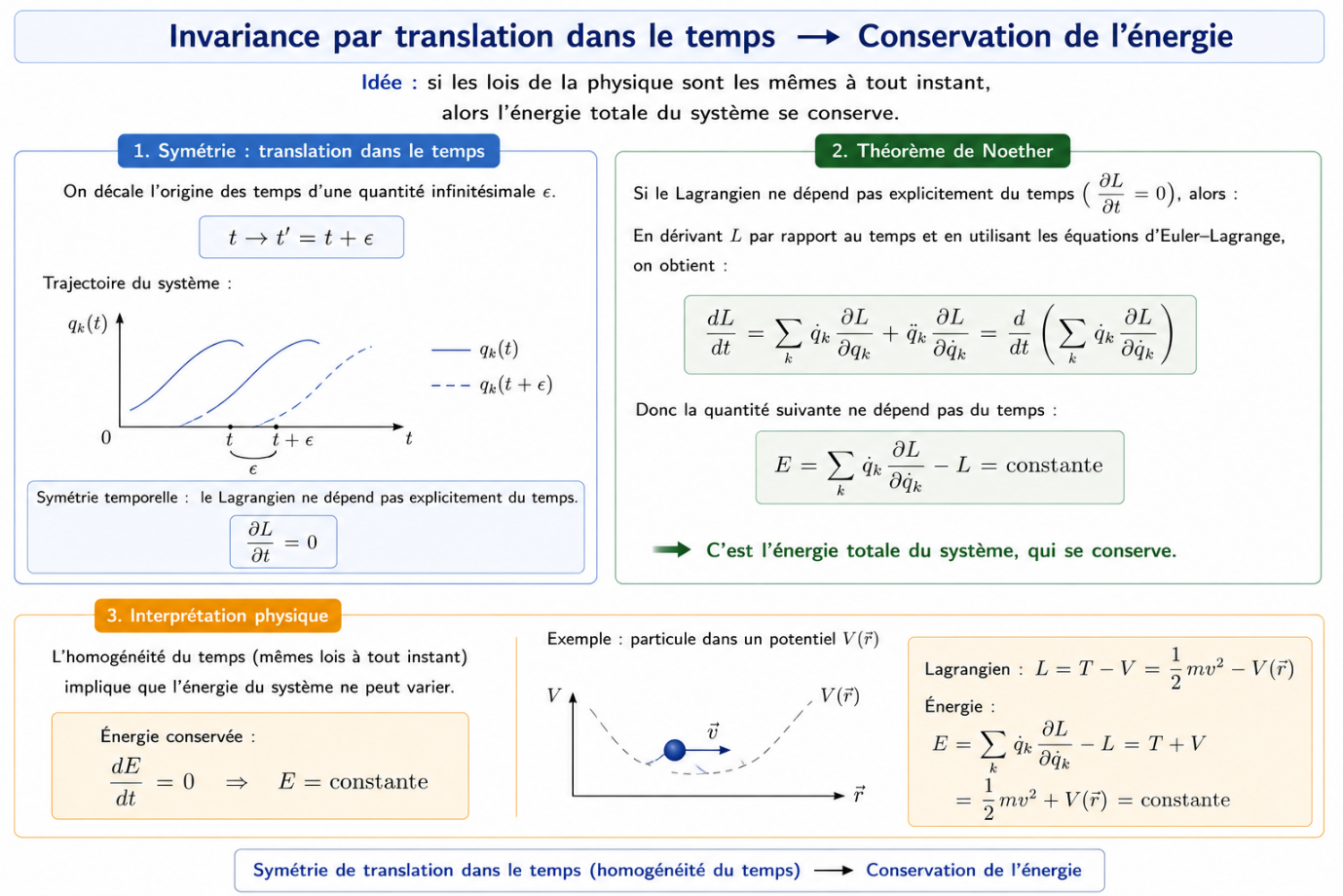
Invariance par translation dans le temps : conservation de l’énergie
Abordons maintenant un dernier exemple, celui qui est peut-être le plus fondamental, la conservation de l’énergie par translation dans le temps. Si on suppose le Lagrangien invariant par translation dans le temps, on a :
\[\frac{\partial}{\partial t}\ L = 0\]
En dérivant le lagrangien par rapport au temps et en introduisant les équations d’Euler-Lagrange pour chaque coordonnée généralisée, on obtient alors :
\[\frac{dL}{dt} = \sum_{k}^{}{{\dot{q}}_{k}\ \frac{\partial L}{\partial q_{k}} + \ddot{q_{k}}\frac{\partial L}{\partial{\dot{q}}_{k}} = \sum_{k}^{}{{\dot{q}}_{k}\ \frac{d}{dt}\left( \frac{\partial L}{\partial{\dot{q}}_{k}} \right) + \ddot{q_{k}}\frac{\partial L}{\partial{\dot{q}}_{k}} = \frac{d}{dt}\left( \sum_{k}^{}{\dot{q}}_{k}\frac{\partial L}{\partial{\dot{q}}_{k}} \right)}}\]
La quantité E définie ci-dessous est l’énergie du système. L’énergie est bien conservée dans le temps.
\[E = \ \ \sum_{k}^{}{\dot{q}}_{k}\frac{\partial L}{\partial{\dot{q}}_{k}} – L\]
On pourra vérifier sur l’exemple simple d’un ensemble de particules dans un champ de potentiel, que le terme ci-dessus est bien la somme de l’énergie cinétique et de l’énergie potentielle.
Conclusion
Le théorème de Noether met en évidence une correspondance fondamentale entre les symétries d’un système physique et ses lois de conservation. À partir d’une hypothèse simple (l’invariance du Lagrangien sous une transformation continue) il permet de démontrer rigoureusement l’existence d’une quantité conservée, dont l’expression est donnée explicitement.
Les exemples étudiés illustrent la portée de ce résultat. La conservation de l’impulsion résulte de l’homogénéité de l’espace, la conservation du moment cinétique de son isotropie, et la conservation de l’énergie de l’homogénéité du temps. Ces lois, souvent introduites de manière indépendante, apparaissent ici comme les conséquences directes de propriétés géométriques fondamentales.
Au-delà de la mécanique classique, le théorème de Noether joue un rôle central dans la physique moderne. Il intervient notamment en théorie des champs, où il permet d’associer des courants conservés aux symétries des équations fondamentales. Il constitue ainsi l’un des piliers conceptuels de la physique théorique, en révélant que les lois de conservation ne sont pas des faits isolés, mais l’expression d’une structure profonde reliant symétrie et dynamique.