La notion de symétrie occupe une place centrale dans la formulation moderne des lois physiques. Qu’il s’agisse des invariances de l’espace et du temps, ou des symétries internes intervenant en théorie quantique des champs, ces propriétés sont à l’origine de contraintes profondes sur la dynamique des systèmes. Leur formalisation mathématique repose sur la théorie des groupes, et plus particulièrement sur celle des groupes de Lie, qui permettent de décrire les symétries continues.
Cependant, la richesse de ces structures ne se limite pas à leur définition abstraite. L’introduction des algèbres de Lie permet d’en donner une description locale et linéarisée, rendant leur étude plus accessible et plus opératoire. Le lien entre groupes et algèbres, assuré notamment par la fonction exponentielle, constitue un outil fondamental pour passer des transformations infinitésimales aux transformations finies.
Dans le cadre de la physique théorique, et en particulier de la théorie quantique des champs, ces concepts prennent une dimension supplémentaire. Les symétries sont décrites par des groupes de Lie spécifiques, dont les propriétés déterminent la nature des interactions fondamentales. Les groupes \(\mathbf{U(1)}\), \(\mathbf{SU(2)\ }\)et \(\mathbf{SU(3)}\) apparaissent ainsi comme les structures sous-jacentes aux interactions électromagnétique, faible et forte, et leurs algèbres de Lie associées permettent d’en analyser les générateurs et les relations de commutation.
Enfin, la notion de représentation permet de relier ces structures abstraites aux objets physiques concrets, en décrivant la manière dont les champs et les particules se transforment sous l’action des symétries. Elle constitue le point de jonction entre l’algèbre et la physique, en donnant une réalisation explicite des groupes et de leurs générateurs.
L’objectif de cet article est de présenter de manière progressive et cohérente les notions de groupes de Lie, d’algèbres de Lie et de représentations, avant d’illustrer ces concepts sur les exemples fondamentaux que sont \(U(1)\), \(SU(2)\ \)et \(SU(3)\). Cette approche permet de mettre en évidence le rôle structurant de ces objets mathématiques dans la compréhension des symétries et des interactions en physique moderne.
Groupes de Lie
La description des symétries continues en physique repose sur la théorie des groupes de Lie. Un groupe de Lie est une structure mathématique qui combine deux aspects fondamentaux : d’une part une structure de groupe, au sens algébrique, et d’autre part une structure de variété différentiable, au sens de la géométrie différentielle. La compatibilité de ces deux structures permet d’introduire des outils analytiques pour étudier les symétries.
Commençons par rappeler la définition d’un groupe. Un groupe est un couple \((G, \cdot )\), où \(G\) est un ensemble et \(\cdot :G \times G \rightarrow G\ \)une loi de composition interne, vérifiant les axiomes suivants : pour tous \(a,b,c \in G\), on a la fermeture \(a \cdot b \in G\), l’associativité \(\left( a \cdot b) \cdot c = a \cdot (b \cdot c \right)\), l’existence d’un élément neutre \(e \in G\ \)tel que \(e \cdot a = a \cdot e = a\), et l’existence pour tout élément \(a \in G\ \)d’un inverse \(a^{- 1} \in G\ \)tel que \(a \cdot a^{- 1} = a^{- 1} \cdot a = e\). Lorsque la loi est commutative, c’est-à-dire lorsque \(a \cdot b = b \cdot a\ \)pour tous \(a,b \in G\), le groupe est dit abélien.
Des exemples élémentaires de groupes sont donnés par \(\left( \mathbb{Z}, + \right)\ \)ou \(\left( \mathbb{R}, + \right)\), qui sont des groupes abéliens. Le premier est un groupe discret, tandis que le second est un groupe continu. Cette distinction entre structures discrètes et continues est essentielle pour la suite : les groupes de Lie sont précisément des groupes continus, au sens où ils possèdent une structure géométrique permettant de définir des notions de différentiabilité.
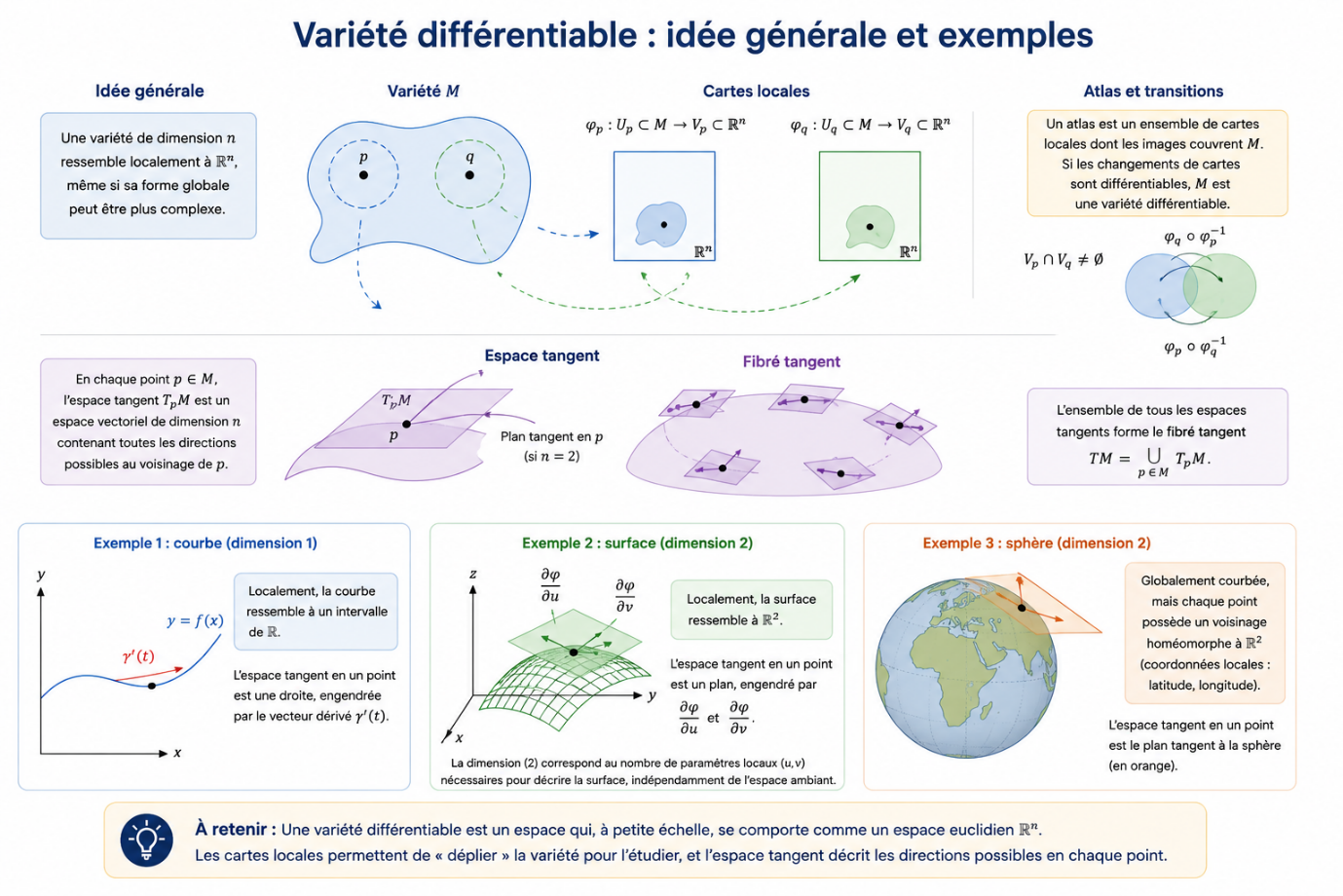
Pour formaliser cette idée, il est nécessaire d’introduire la notion de variété. Une variété différentiable de dimension \(n\ \)est un espace qui, localement, est isomorphe à \(\mathbb{R}^{n}\). Plus précisément, une variété topologique \(M\ \)est un espace dans lequel chaque point possède un voisinage homéomorphe à un ouvert de \(\mathbb{R}^{n}\). Cela signifie que, localement, la structure de \(M\ \)est celle d’un espace euclidien, même si globalement elle peut être plus complexe.
On introduit pour cela des cartes locales, c’est-à-dire des applications bijectives continues \(\varphi:U \subset M \rightarrow V \subset \mathbb{R}^{n}\), où \(U\ \)est un ouvert de la variété. Un ensemble de telles cartes recouvrant \(M\) est appelé un atlas. Lorsque les changements de cartes (applications de transition) sont différentiables, la variété est dite différentiable.
Cette structure permet de définir, en chaque point \(p \in M\), un espace tangent \(T_{p}M\), qui est un espace vectoriel de dimension \(n\). Intuitivement, cet espace tangent représente les directions possibles dans lesquelles on peut se déplacer à partir du point \(p\). L’ensemble de tous ces espaces tangents constitue le fibré tangent de la variété.
Un premier exemple fondamental de variété est celui d’une courbe. Une courbe régulière peut être définie comme l’image d’une application différentiable \(\gamma\ :I \subset \mathbb{R} \rightarrow \mathbb{R}^{n}\). Elle constitue une variété différentiable de dimension 1. Localement, une courbe « ressemble » à un intervalle de \(\mathbb{R}\), ce qui correspond précisément à la définition abstraite d’une variété. Par exemple, le graphe d’une fonction \(y = f(x)\ \)dans \(\mathbb{R}^{2\ }\)définit une courbe. En chaque point de cette courbe, l’espace tangent est une droite, engendrée par le vecteur dérivé \(\gamma'(t)\), ce qui traduit le fait que la variété est de dimension 1.
Un deuxième exemple est celui des surfaces. Une surface est une variété différentiable de dimension 2, c’est-à-dire qu’elle est localement homéomorphe à \(\mathbb{R}^{2}\). Elle peut être définie comme l’image d’une application \(\varphi:U \subset \mathbb{R}^{2} \rightarrow \mathbb{R}^{n}\), où \(U\ \)est un ouvert. Par exemple, une surface dans \(\mathbb{R}^{3}\ \)peut être paramétrée par deux variables \(\left( u,v \right)\). En chaque point, l’espace tangent est un plan de dimension 2, engendré par les vecteurs \(\partial\varphi/\partial u\ \)et \(\partial\varphi/\partial v\). Cet exemple illustre le fait que la dimension de la variété correspond au nombre de paramètres nécessaires pour la décrire localement, indépendamment de l’espace ambiant.
Un exemple particulièrement intuitif est celui de la sphère, qui modélise le globe terrestre. La surface de la Terre peut être vue comme une variété différentiable de dimension 2 plongée dans \(\mathbb{R}^{3}\). Bien qu’elle soit globalement courbée, chaque point possède un voisinage qui peut être décrit à l’aide de coordonnées locales, telles que la latitude et la longitude (en excluant les singularités aux pôles dans ce système de coordonnées). Localement, la surface terrestre est donc assimilable à un plan, ce qui correspond à l’idée qu’une variété « ressemble » à un espace euclidien à petite échelle. En chaque point, l’espace tangent est un plan tangent à la sphère, qui joue un rôle central en géométrie différentielle et en physique.
A noter que l’intérêt des variétés différentiables n’est pas limité à la physique des particules : elles constituent également le langage fondamental de la relativité générale. Dans cette théorie, l’espace-temps lui-même est modélisé comme une variété différentiable de dimension 4, dont les points représentent des événements. La structure différentielle permet d’y définir des champs, des dérivées et des équations différentielles, éléments indispensables à la formulation des lois physiques.
À cette structure est ajoutée une métrique pseudo-riemannienne, c’est-à-dire un champ de tenseurs symétriques de signature non définie positive, qui permet de mesurer localement les distances et les durées. Cette métrique encode la géométrie de l’espace-temps et remplace le rôle du potentiel gravitationnel de la mécanique classique : la gravitation y apparaît comme une manifestation de la courbure de la variété. Ainsi, les trajectoires des particules sont décrites comme des géodésiques de cette géométrie.
L’introduction d’une telle structure géométrique enrichit considérablement la théorie des variétés différentiables, en y ajoutant des notions de connexion, de courbure et de transport parallèle. Ces concepts dépassent le cadre de cet article, mais illustrent la puissance du formalisme des variétés différentiables, qui sert de socle à certaines des théories physiques les plus fondamentales. Nous reviendrons sur ces aspects dans un autre article consacré à la relativité générale.
Mais revenons aux groupes de Lie qui sont donc définis comme un groupe \(G\ \)muni d’une structure de variété différentiable telle que les applications :
\[G \times G \rightarrow G,(g,h) \mapsto gh\]
Et
\[G \rightarrow G,g \mapsto g^{- 1}\]
soient différentiables. Cette condition exprime la compatibilité entre la structure algébrique et la structure géométrique.
Les exemples les plus importants en physique sont des groupes de matrices. Le groupe linéaire général complexe \(GL(n,\mathbb{C})\ \)est l’ensemble des matrices inversibles \(n \times n\ \)à coefficients complexes, muni de la multiplication matricielle. La condition d’inversibilité s’exprime par \(\det(g) \neq 0\). Ce groupe constitue un exemple fondamental de groupe de Lie de dimension \(2n^{2}\).
Parmi ces groupes, on s’intéresse particulièrement aux groupes unitaires. Le groupe unitaire \(U(n)\ \)est défini comme l’ensemble des matrices complexes \(U\ \)vérifiant
\[U^{\dagger}U = UU^{\dagger} = Id\]
Où \(U^{\dagger}\ \)désigne l’adjoint de \(U\ \)(transposée conjuguée). Ces matrices préservent le produit scalaire hermitien et leur déterminant est de module égal à un.
Le groupe spécial unitaire \(SU(n)\ \)est le sous-groupe de \(U(n)\ \)constitué des matrices de déterminant égal à 1 :
\[SU(n) = \{ U \in U(n) \mid \det(U) = 1\}\]
Ce groupe joue un rôle central en physique des particules, car il apparaît dans la description des interactions fondamentales. Il s’agit d’un groupe de Lie compact et non abélien pour \(n \geq 2\).
Ainsi, les groupes de Lie fournissent le cadre mathématique naturel pour décrire les symétries continues. Leur double nature, à la fois algébrique et géométrique, permet d’introduire des outils puissants qui seront développés dans la suite, notamment à travers la notion d’algèbre de Lie associée.
Algèbres de Lie
Dans le chapitre précédent, nous avons introduit les groupes de Lie comme des structures décrivant les symétries continues. L’étude locale de ces groupes, au voisinage de l’élément neutre, conduit naturellement à la notion d’algèbre de Lie. Une algèbre de Lie peut être vue comme la version linéarisée d’un groupe de Lie, et fournit un outil particulièrement efficace pour en analyser la structure.
Une algèbre de Lie, notée \(\mathfrak{g}\), est un espace vectoriel sur un corps (en général \(\mathbb{R\ }\)ou \(\mathbb{C}\)), muni d’une application bilinéaire :
\[\lbrack \cdot , \cdot \rbrack\ :\mathfrak{g} \times \mathfrak{g} \rightarrow \mathfrak{g}\]
Cette application est appelée crochet de Lie, et satisfait deux propriétés fondamentales. La première est l’antisymétrie :
\[\lbrack X,Y\rbrack = – \lbrack Y,X\rbrack,\forall X,Y \in \mathfrak{g}\]
La seconde est l’identité de Jacobi :
\[\lbrack X,\lbrack Y,Z\rbrack\rbrack + \lbrack Y,\lbrack Z,X\rbrack\rbrack + \lbrack Z,\lbrack X,Y\rbrack\rbrack = 0,\forall X,Y,Z \in \mathfrak{g}\]
Ces propriétés encadrent de manière très forte la structure de l’algèbre et jouent un rôle central dans la théorie.
L’identité de Jacobi, qui peut apparaître au premier abord comme une contrainte technique, trouve en réalité son origine dans la structure des transformations infinitésimales. Elle s’interprète naturellement lorsque le crochet de Lie est défini comme un commutateur, par exemple dans une algèbre associative. En effet, si l’on considère des éléments \(X,Y,Z\ \)et le crochet \(\lbrack X,Y\rbrack = XY – YX\), alors l’identité de Jacobi découle directement de l’associativité du produit. Plus profondément, cette identité exprime la compatibilité du crochet avec la composition des transformations infinitésimales : elle garantit que l’opération \({ad}_{X}:Y \mapsto \lbrack X,Y\rbrack\ \)agit comme une dérivation. Autrement dit, elle assure que les générateurs infinitésimaux d’un groupe de Lie se combinent de manière cohérente, ce qui est indispensable pour relier la structure locale de l’algèbre à la structure globale du groupe.
L’antisymétrie implique en particulier que \(\lbrack X,X\rbrack = 0\ \)pour tout \(X \in \mathfrak{g}\). L’identité de Jacobi, quant à elle, peut être interprétée comme une condition de compatibilité du crochet avec lui-même. Elle traduit une forme de cohérence dans la composition des transformations infinitésimales.
Un exemple fondamental d’algèbre de Lie est fourni par toute algèbre associative. Soit \((A, \cdot )\ \)une algèbre associative sur un corps. On peut définir sur \(A\ \)un crochet de Lie en posant
\[\lbrack X,Y\rbrack = X \cdot Y – Y \cdot X\]
Ce crochet est bilinéaire, antisymétrique, et vérifie l’identité de Jacobi. Ainsi, toute algèbre associative induit naturellement une algèbre de Lie, appelée algèbre de Lie associée.
Un cas particulièrement important est celui des matrices. L’ensemble \(M_{n}(\mathbb{C})\ \)des matrices carrées de dimension \(n \times n\ \)à coefficients complexes forme une algèbre associative pour le produit matriciel usuel. En munissant cet espace du crochet :
\[\lbrack X,Y\rbrack = XY – YX\]
On obtient une algèbre de Lie. Cette structure est omniprésente en physique, car les observables et générateurs de symétrie sont souvent représentés par des matrices ou des opérateurs.
Cependant, il est important de noter que toutes les algèbres de Lie ne proviennent pas d’une algèbre associative. La définition abstraite donnée plus haut est plus générale et permet d’englober des structures qui n’admettent pas nécessairement de produit associatif sous-jacent. Cette généralité est essentielle, notamment dans l’étude des groupes de Lie abstraits.
Enfin, une propriété fondamentale des algèbres de Lie est leur caractère local : elles décrivent le comportement infinitésimal d’un groupe de Lie au voisinage de l’élément neutre. Plus précisément, si \(G\) est un groupe de Lie, l’espace tangent en l’élément neutre \(e\), noté \(T_{e}G\), peut être muni d’une structure d’algèbre de Lie. Cette algèbre encode l’information infinitésimale du groupe, et permet souvent de reconstruire une grande partie de sa structure globale.
Ainsi, les algèbres de Lie apparaissent comme l’outil naturel pour étudier les symétries continues sous une forme linéaire et locale. Leur rôle deviendra encore plus clair dans le chapitre suivant, où nous établirons le lien précis entre groupes de Lie et algèbres de Lie à l’aide de la fonction exponentielle.
Liens entre Groupes de Lie et algèbre de Lie – L’exponentielle
Les algèbres de Lie sont intimement liées aux groupes de Lie dont elles décrivent la structure locale. Cette relation repose sur l’étude du groupe au voisinage de son élément neutre, et constitue un pont fondamental entre une structure géométrique non linéaire et une structure algébrique linéaire.
Soit \(G\ \)un groupe de Lie, que l’on suppose pour fixer les idées être un sous-groupe de \(GL(n,\mathbb{C})\). L’espace tangent en l’élément neutre \(e\), noté \(T_{e}G\), est un espace vectoriel qui peut être muni d’une structure d’algèbre de Lie. Dans le cadre matriciel, cette structure est donnée par le commutateur
\[\lbrack X,Y\rbrack = XY – YX\]
Celui-ci vérifie les propriétés d’antisymétrie et l’identité de Jacobi. L’espace tangent \(T_{e}G\), muni de ce crochet, constitue l’algèbre de Lie associée au groupe \(G\), que l’on note généralement \(\mathfrak{g}\).
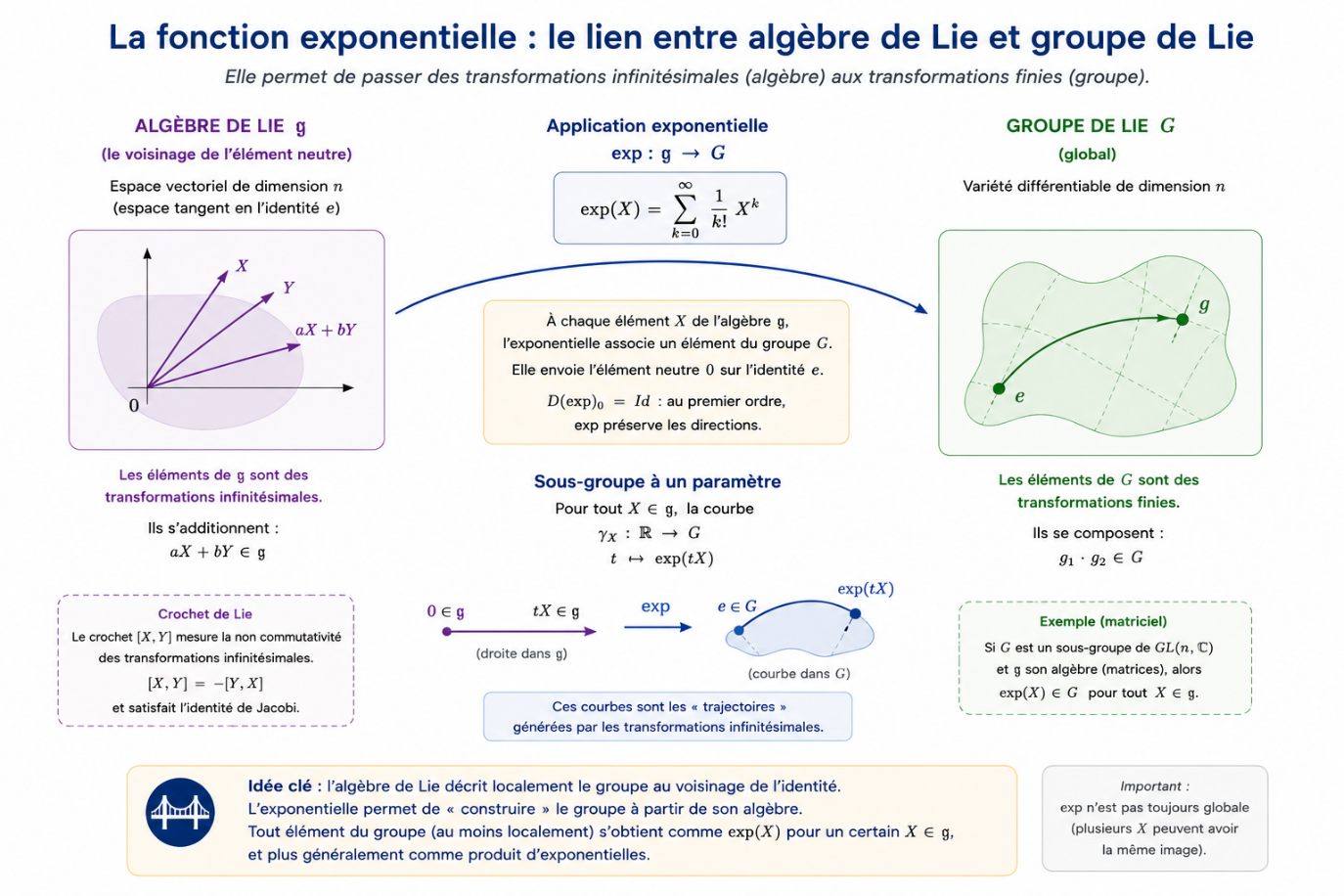
L’idée fondamentale est que les éléments de \(\mathfrak{g\ }\)représentent des transformations infinitésimales du groupe. Pour relier ces transformations infinitésimales aux transformations finies du groupe, on introduit la fonction exponentielle matricielle. Pour toute matrice \(A \in M_{n}(\mathbb{C})\), l’exponentielle est définie par la série convergente
\[\exp(A) = \sum_{k = 0}^{\infty}\frac{1}{k!}A^{k}\]
Cette définition généralise l’exponentielle usuelle et possède des propriétés remarquables, notamment le fait que si \(A\ \)et \(B\ \)commutent, alors \(\exp(A + B) = \exp(A)\ \exp(B)\)
Dans le contexte des groupes de Lie matriciels, l’exponentielle permet de construire des éléments du groupe à partir de son algèbre de Lie. Plus précisément, si \(\mathfrak{g\ }\)est l’algèbre de Lie de \(G\), alors pour tout élément \(X \in \mathfrak{g}\), la courbe \(t \mapsto \exp(tX)\) définit une trajectoire dans le groupe \(G\), appelée sous-groupe à un paramètre. Réciproquement, l’algèbre de Lie peut être caractérisée comme l’ensemble des matrices \(X\ \)telles que \(\exp(tX) \in G\ \)pour tout \(t\ \)réel. Cette propriété relie de manière directe la structure infinitésimale du groupe à sa structure globale.
Il est important de noter que l’application exponentielle ne permet pas, en général, de paramétrer globalement tout le groupe. Toutefois, elle engendre localement le groupe au voisinage de l’élément neutre, et tout élément de \(G\) peut être exprimé comme un produit fini d’exponentielles d’éléments de \(\mathfrak{g}\). Ainsi, l’étude du groupe peut être largement ramenée à celle de son algèbre de Lie, qui est un espace vectoriel de dimension finie muni d’une structure algébrique simple.
Si \(\left\{ X_{i} \right\}\ \)est une base de l’algèbre de Lie \(\mathfrak{g}\), ces éléments sont appelés générateurs infinitésimaux du groupe. Les éléments du groupe s’obtiennent alors, au moins localement, en exponentiant des combinaisons linéaires de ces générateurs. Cette correspondance est au cœur de nombreuses constructions en physique, notamment dans la théorie quantique des champs, où les symétries sont décrites par des groupes de Lie et leurs générateurs.
Enfin, il convient de signaler une convention importante en physique. Alors que les mathématiciens travaillent naturellement avec des matrices anti-hermitiennes pour décrire les algèbres de Lie des groupes unitaires, les physiciens préfèrent utiliser des matrices hermitiennes. Dans ce cadre, l’application exponentielle est modifiée en :
\[X \mapsto \exp( – iX)\]
Où \(X\) est hermitienne. Cette convention permet d’assurer que les observables physiques, représentées par des opérateurs hermitiens, génèrent des transformations unitaires, ce qui est essentiel en mécanique quantique.
Ainsi, la fonction exponentielle établit le lien fondamental entre groupes de Lie et algèbres de Lie, en permettant de passer des transformations infinitésimales aux transformations finies. Elle constitue un outil central pour l’étude des symétries continues, et sera particulièrement utile dans l’analyse des groupes \(U(1)\), \(SU(2)\ \)et \(SU(3)\ \)abordés dans le chapitre suivant.
Les principaux Groupes de Lie de la physique quantique
Les chapitres précédents ont permis d’introduire les notions fondamentales de groupes de Lie et d’algèbres de Lie, ainsi que le lien profond qui les unit à travers la fonction exponentielle. Ces structures mathématiques, qui peuvent sembler abstraites à première vue, trouvent en réalité leur pleine signification dans leur application à la physique, et en particulier à la théorie quantique des champs.
En physique moderne, les symétries jouent un rôle central dans la formulation des lois fondamentales. Comme nous l’avons vu à travers le théorème de Noether, toute symétrie continue d’un système physique est associée à une loi de conservation. Dans le cadre de la théorie quantique des champs, ces symétries ne sont pas seulement des propriétés géométriques de l’espace ou du temps, mais peuvent également être des symétries internes, agissant sur les champs eux-mêmes. Ces symétries sont décrites mathématiquement par des groupes de Lie, et leurs générateurs infinitésimaux par les algèbres de Lie correspondantes.
Un point fondamental est que les interactions fondamentales peuvent être comprises comme la conséquence de l’invariance de jauge locale sous un groupe de Lie donné. Cette idée, déjà esquissée dans le cas de l’électromagnétisme, se généralise naturellement : à chaque groupe de jauge est associée une interaction physique. Ainsi, la structure même des forces fondamentales est intimement liée à la nature des groupes de Lie sous-jacents.
Dans ce contexte, trois groupes jouent un rôle particulier en théorie quantique des champs : le groupe \(U(1)\), qui décrit l’électromagnétisme, le groupe \(SU(2)\), qui intervient dans l’interaction faible, et le groupe \(SU(3)\), qui est au cœur de la chromodynamique quantique décrivant l’interaction forte. Ces groupes, à la fois simples dans leur définition et riches dans leurs propriétés, constituent les briques élémentaires du modèle standard de la physique des particules.
Dans les sections qui suivent, nous allons étudier successivement ces trois groupes, en mettant en évidence leur structure mathématique, leurs algèbres de Lie associées, ainsi que leur rôle physique. Cette analyse permettra de comprendre comment des structures algébriques abstraites se traduisent concrètement par les symétries et les interactions observées dans la nature.
Le Groupe U(1)
On commence par le plus simple des groupes de Lie apparaissant en théorie quantique des champs : le groupe unitaire \(\mathbf{U(1)}\). Ce groupe est défini comme l’ensemble des nombres complexes de module égal à 1 :
\[U(1) = \{ z \in \mathbb{C} \mid \mid z \mid = 1\}\]
Tout élément \(z \in U(1)\ \)peut s’écrire sous la forme exponentielle :
\[z = e^{i\theta},\theta \in \mathbb{R}\]
La loi de composition est la multiplication complexe, ce qui donne :
\[e^{i\theta_{1}} \cdot e^{i\theta_{2}} = e^{i(\theta_{1} + \theta_{2})}\]
L’élément neutre est \(1 = e^{i0}\), et l’inverse de \(e^{i\theta\ }\)est \(e^{- i\theta}\). Le groupe \(U(1)\ \)est donc un groupe abélien, c’est-à-dire commutatif, et ses éléments sont paramétrés par un unique paramètre réel \(\theta\).
Du point de vue géométrique, \(U(1)\)s’identifie au cercle unité du plan complexe. Il s’agit donc d’une variété différentiable de dimension 1. La structure de groupe est compatible avec la structure différentielle : l’application
\[(\theta_{1},\theta_{2}) \mapsto \theta_{1} + \theta_{2}\]
est de classe \(C^{\infty}\), de même que l’application d’inversion \(\theta \mapsto – \theta\). Ainsi, \(U(1)\ \)est un groupe de Lie compact et connexe de dimension 1.
L’algèbre de Lie associée à \(U(1)\), notée \(\mathfrak{u}(1)\), est l’espace tangent au groupe en l’élément neutre \(e = 1\), correspondant à \(\theta = 0\). Dans la représentation matricielle, on identifie \(U(1)\ \)à l’ensemble des matrices complexes \(1 \times 1\ \)de la forme \(e^{i\theta}\), et l’espace tangent en l’identité est constitué des dérivées de courbes \(t \mapsto e^{it\theta}\ \)en \(t = 0\), ce qui conduit à :
\[\mathfrak{u}(1) = \{ i\alpha \mid \alpha \in \mathbb{R}\} = i\mathbb{R}\]
Le crochet de Lie est trivial, car le groupe est abélien :
\[\lbrack X,Y\rbrack = 0,\forall X,Y \in \mathfrak{u}(1)\]
L’application exponentielle établit alors une correspondance simple entre l’algèbre et le groupe :
\[\exp:\mathfrak{u}(1) \rightarrow U(1),\ i\theta \mapsto e^{i\theta}\]
Ainsi, le groupe \(U(1)\ \)peut être vu comme l’image de son algèbre de Lie par l’exponentielle.
En physique, il est courant d’adopter une convention légèrement différente en travaillant avec des générateurs hermitiens plutôt qu’anti-hermitiens. Dans ce cadre, on identifie l’algèbre de Lie à \(\mathbb{R}\), et l’application exponentielle s’écrit
\[\theta \mapsto e^{- i\theta}\]
Cette convention est particulièrement adaptée à la mécanique quantique, où les générateurs des symétries sont représentés par des opérateurs hermitiens.
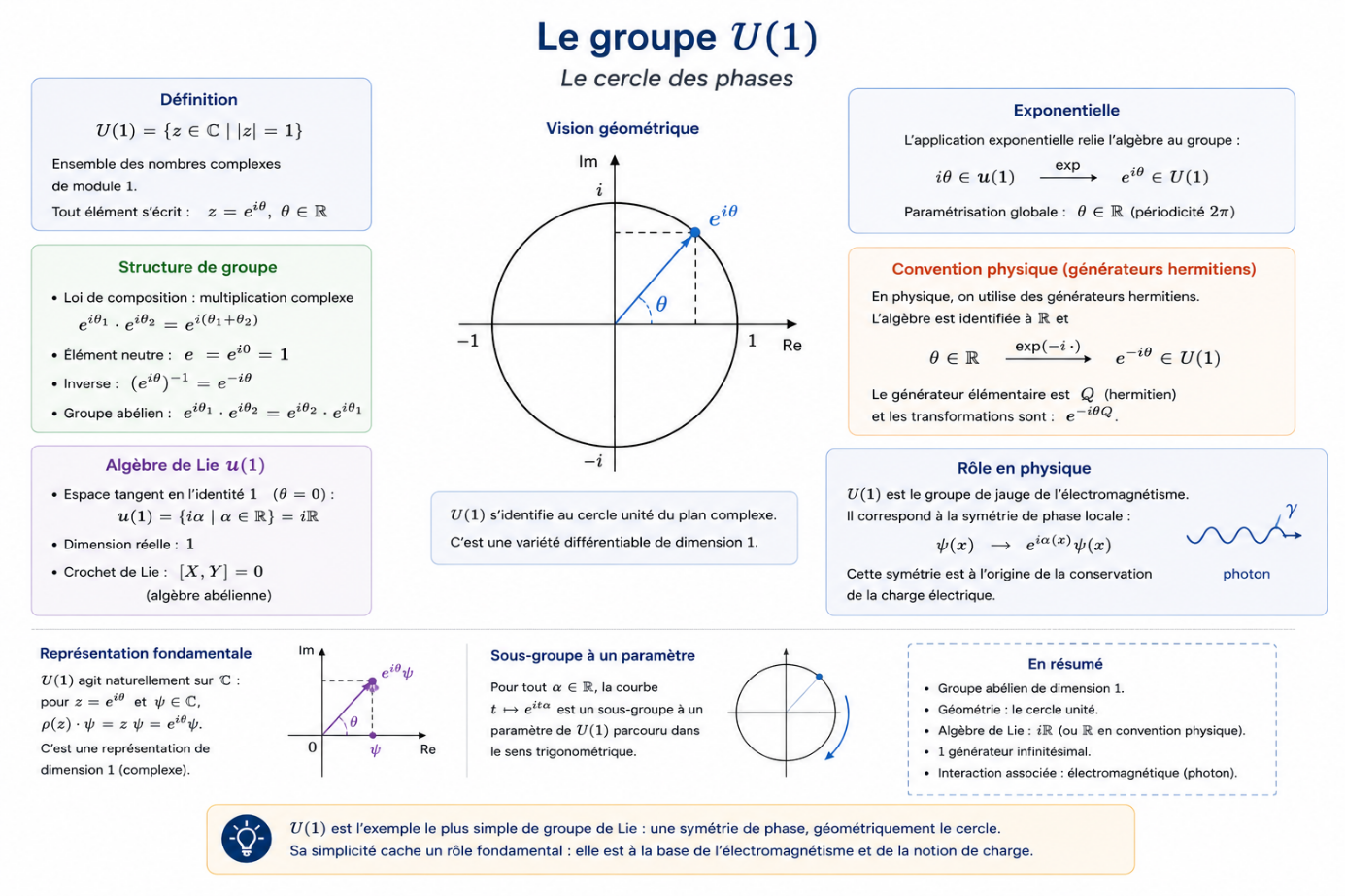
Le groupe \(U(1)\ \)joue un rôle fondamental en théorie quantique des champs : il correspond à la symétrie de phase globale ou locale de la fonction d’onde, et constitue le groupe de jauge de l’électromagnétisme. L’invariance sous \(U(1)\ \)est directement liée à la conservation de la charge électrique, illustrant de manière particulièrement simple le lien profond entre symétrie et loi de conservation.
Le Groupe SU(2)
On considère maintenant le groupe spécial unitaire \(\mathbf{SU(2)}\), qui constitue le premier exemple non trivial de groupe de Lie non abélien. Par définition,
\[SU(2) = \{ U \in M_{2}(\mathbb{C}) \mid U^{\dagger}U = Id,\ det\ (U)\ = \ 1\}\]
Ce groupe est formé des matrices unitaires \(2 \times 2\ \)de déterminant égal à 1. La condition d’unitarité signifie que ces matrices préservent le produit scalaire hermitien, tandis que la condition \(\det(U) = 1\ \)impose une contrainte supplémentaire qui restreint le groupe à une sous-variété de dimension plus faible.
Du point de vue géométrique, \(SU(2)\ \)est un groupe de Lie compact, connexe, et de dimension réelle 3. Il peut être montré que, comme variété différentiable, \(SU(2)\ \)est difféomorphe à la sphère \(S^{3\ }\)dans \(\mathbb{R}^{4}\), ce qui en fait un objet fondamental en géométrie et en physique.
L’algèbre de Lie associée, notée \(\mathfrak{su}(2)\), est constituée des matrices \(2 \times 2\ \)complexes \(X\ \)vérifiant
\[X^{\dagger} = – X,Tr(X) = 0\]
La première condition exprime le caractère anti-hermitien des éléments de l’algèbre, tandis que la seconde découle de la contrainte sur le déterminant du groupe, via la relation
\[\det(\exp X) = \exp(Tr(X))\]
Le crochet de Lie est donné par le commutateur matriciel \(\lbrack X,Y\rbrack = XY – YX\).
L’espace vectoriel \(\mathfrak{su}(2)\ \)est de dimension réelle 3. Une base particulièrement importante est obtenue à partir des matrices de Pauli :
\[\sigma_{1} = \begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix},\sigma_{2} = \begin{pmatrix} 0 & – i \\ i & 0 \end{pmatrix},\sigma_{3} = \begin{pmatrix} 1 & 0 \\ 0 & – 1 \end{pmatrix}\]
Ces matrices sont hermitiennes et de trace nulle. En physique, il est d’usage de travailler avec des générateurs hermitiens, ce qui conduit à identifier une base de l’algèbre à \(\left\{ \sigma_{i} \right\}\), tandis que, du point de vue mathématique, les éléments de \(\mathfrak{su}(2)\ \)sont donnés par les matrices anti-hermitiennes \(i\sigma_{i}\).
Les relations de commutation entre les générateurs prennent alors la forme
\[\lbrack\sigma_{i},\sigma_{j}\rbrack = 2i\varepsilon_{ijk}\sigma_{k},\]
Où \(\varepsilon_{ijk}\ \)est le symbole de Levi-Civita. Ces relations caractérisent entièrement la structure de l’algèbre \(\mathfrak{su}(2)\ \)et mettent en évidence son caractère non abélien.
L’application exponentielle permet de reconstruire le groupe à partir de son algèbre. Tout élément \(U \in SU(2)\ \)peut s’écrire sous la forme :
\[U = \exp\left( – \frac{i}{2}\text{ }\overrightarrow{\theta} \cdot \overrightarrow{\sigma} \right),\]
Où \(\overrightarrow{\theta} \in \mathbb{R}^{3}\). Cette représentation met en évidence le fait que les éléments du groupe sont obtenus à partir des générateurs infinitésimaux. Bien que cette paramétrisation soit particulièrement simple au voisinage de l’identité, elle permet en réalité de décrire globalement le groupe, en raison de la compacité de \(SU(2)\).
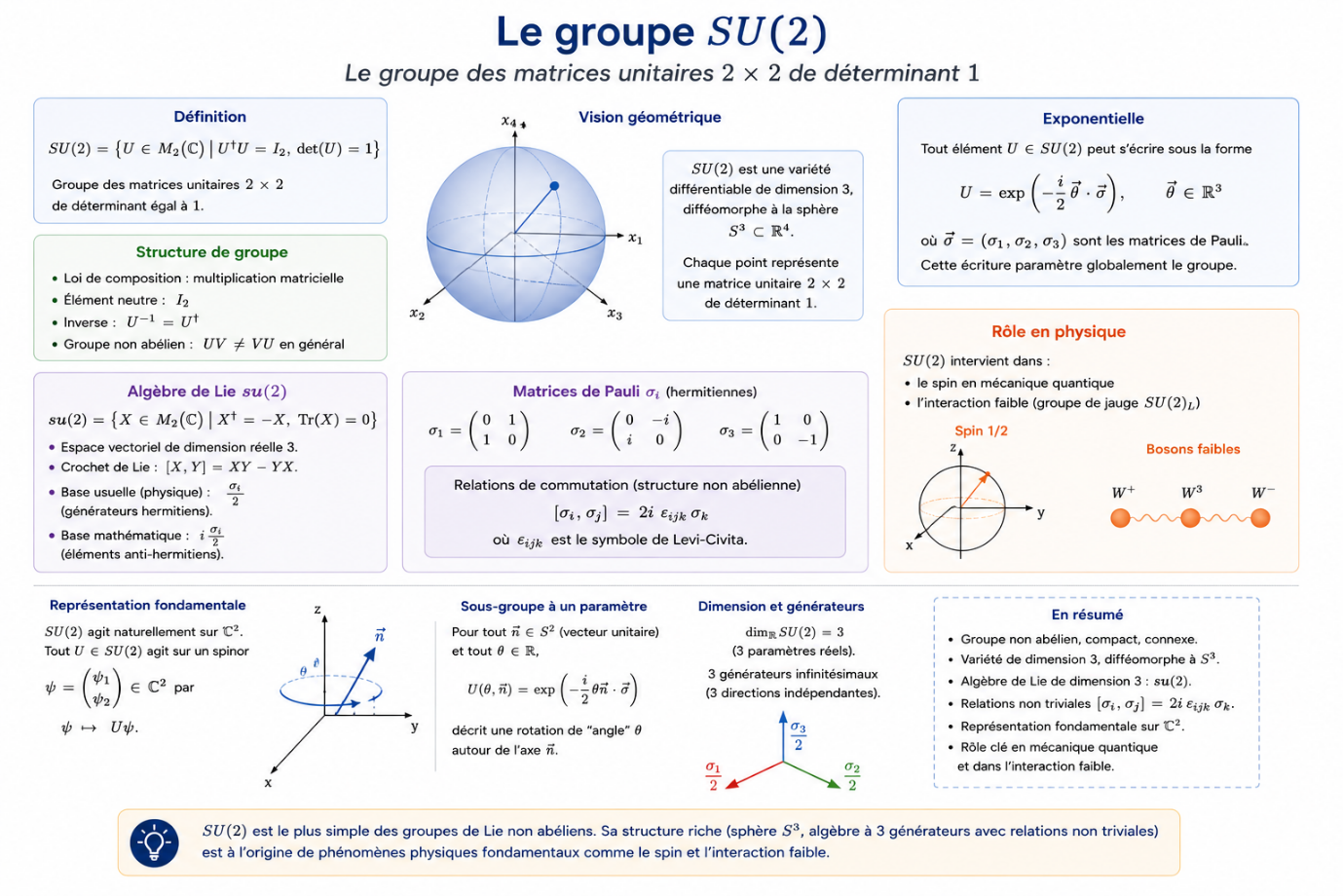
Le groupe \(SU(2)\ \)joue un rôle fondamental en physique. Il intervient notamment dans la description du spin en mécanique quantique, ainsi que dans la théorie de l’interaction faible en théorie quantique des champs. Sa structure non abélienne en fait le prototype des groupes de jauge non commutatifs, dont les propriétés sont à l’origine de phénomènes physiques riches et complexes.s u ( 2 ) {\displaystyle {\mathfrak {su}}(2)} s
Le Groupe SU(3)
On considère maintenant le groupe spécial unitaire \(\mathbf{SU(3)}\), qui constitue une généralisation naturelle de \(SU(2)\ \)et joue un rôle central en théorie quantique des champs, en particulier dans la description de l’interaction forte. Par définition,
\[SU(3) = \{ U \in M_{3}(\mathbb{C}) \mid U^{\dagger}U = Id,\text{ Det (U)=1}\}\]
Il s’agit donc du groupe des matrices unitaires \(3 \times 3\ \)de déterminant égal à 1. Comme pour \(SU(2)\), la condition d’unitarité assure la conservation du produit scalaire hermitien, tandis que la contrainte sur le déterminant restreint le groupe à une sous-variété compacte.
Le groupe \(SU(3)\ \)est un groupe de Lie compact, connexe et non abélien, de dimension réelle 8. Cette dimension peut être comprise en remarquant que l’espace des matrices complexes \(3 \times 3\ \)dépend de 18 paramètres réels, que les conditions d’unitarité imposent 9 contraintes réelles, et que la condition \(\det(U) = 1\ \)enlève encore un degré de liberté.
L’algèbre de Lie associée, notée \(\mathfrak{su}(3)\), est constituée des matrices \(3 \times 3\ \)complexes \(X\ \)vérifiant
\[X^{\dagger} = – X,Tr(X) = 0\]
Comme dans le cas de \(SU(2)\), le crochet de Lie est donné par le commutateur matriciel \(\lbrack X,Y\rbrack = XY – YX\). L’espace vectoriel \(\mathfrak{su}(3)\ \)est de dimension réelle 8.
Une base usuelle de \(\mathfrak{su}(3)\ \)est donnée, du point de vue physique, par les matrices de Gell-Mann \(\lambda_{a}\), \(a = 1,\ldots,8\), qui généralisent les matrices de Pauli. Ces matrices sont hermitiennes, de trace nulle, et satisfont des relations de commutation de la forme :
\[\lbrack\lambda_{a},\lambda_{b}\rbrack = 2if_{abc}\lambda_{c}\]
Où les \(f_{abc}\ \)sont les constantes de structure de l’algèbre \(\mathfrak{su}(3)\), totalement antisymétriques.
Les matrices de Gell-Mann \(\lambda_{a}\), \(a = 1,\ldots,8\), qui généralisent les matrices de Pauli s’écrivent :
\[\lambda_{1} = \begin{pmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix}{\ \ \ \lambda}_{2} = \begin{pmatrix} 0 & – i & 0 \\ i & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix}\ {\ \ \lambda}_{3} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & – 1 & 0 \\ 0 & 0 & 0 \end{pmatrix},\]
\[\lambda_{4} = \begin{pmatrix} 0 & 0 & 1 \\ 0 & 0 & 0 \\ 1 & 0 & 0 \end{pmatrix}{\ \ \lambda}_{5} = \begin{pmatrix} 0 & 0 & – i \\ 0 & 0 & 0 \\ i & 0 & 0 \end{pmatrix}{\ \ \lambda}_{6} = \begin{pmatrix} 0 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 1 & 0 \end{pmatrix},\]
\[\lambda_{7} = \begin{pmatrix} 0 & 0 & 0 \\ 0 & 0 & – i \\ 0 & i & 0 \end{pmatrix}{\ \ \ \ \lambda}_{8} = \frac{1}{\sqrt{3}}\begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & – 2 \end{pmatrix}. \]
Comme précédemment, les mathématiciens travaillent naturellement avec les générateurs anti-hermitiens \(i\lambda_{a}\), tandis que les physiciens privilégient les générateurs hermitiens.
L’application exponentielle permet de relier l’algèbre au groupe. Tout élément \(U \in SU(3)\ \)peut être écrit, au moins localement, sous la forme :
\[U = \exp\left( \ -i\sum_{a = 1}^{8}\theta_{a}\lambda_{a} \right)\]
Où les \(\theta_{a} \in \mathbb{R\ }\)paramètrent le groupe. Les matrices \(\mathbf{\lambda}_{\mathbf{a}}\mathbf{\ }\)jouent ainsi le rôle de générateurs infinitésimaux des transformations du groupe.
Le groupe \(SU(3)\ \)intervient de manière fondamentale en physique des particules dans le cadre de la chromodynamique quantique (QCD), où il apparaît comme groupe de jauge décrivant l’interaction forte. Les huit générateurs de \(\mathfrak{su}(3)\ \)correspondent aux huit bosons de jauge, appelés gluons, qui assurent l’interaction entre les quarks. La structure non abélienne du groupe est à l’origine de propriétés caractéristiques de l’interaction forte, telles que l’auto-interaction des gluons et le phénomène de confinement.
Ainsi, le groupe \(SU(3)\ \)illustre de manière particulièrement riche le lien entre structure mathématique et phénomènes physiques : une algèbre de Lie de dimension 8, définie de manière abstraite, se traduit concrètement par la dynamique des particules élémentaires au sein du modèle standard.

On notera en particulier que la dimension de l’algèbre de Lie associée à chacun de ces groupes correspond au nombre de générateurs infinitésimaux : un pour \(U(1)\), trois pour \(SU(2)\ \)et huit pour \(SU(3)\). Cette propriété mathématique trouve une interprétation physique directe en théorie quantique des champs, où chaque générateur est associé à un boson de jauge. Ainsi, le groupe \(U(1)\ \)est lié au photon dans l’électromagnétisme, \(SU(2)\ \)aux trois bosons intermédiaires de l’interaction faible, et \(SU(3)\ \)aux huit gluons de l’interaction forte. Ce parallèle illustre de manière particulièrement frappante le rôle fondamental des structures de Lie dans l’organisation des interactions élémentaires.
Représentations des groupes et des algèbres de Lie
Les groupes de Lie et leurs algèbres associées fournissent une description abstraite des symétries. Pour établir un lien concret avec les objets physiques ou mathématiques sur lesquels ces symétries agissent, il est nécessaire d’introduire la notion de représentation. Une représentation permet en effet de réaliser les éléments d’un groupe ou d’une algèbre comme des transformations linéaires agissant sur un espace vectoriel.
Soit \(G\ \)un groupe de Lie. Une représentation de \(G\) est un homomorphisme de groupes
\[\rho:G \rightarrow GL(V)\]
Où \(V\ \)est un espace vectoriel et \(GL(V)\ \)le groupe des automorphismes linéaires inversibles de \(V\). Cette application associe à chaque élément \(g \in G\)une transformation linéaire \(\rho(g)\ \)telle que
\[\rho(g_{1}g_{2}) = \rho(g_{1})\rho(g_{2}),\forall g_{1},g_{2} \in G\]
Autrement dit, la structure du groupe est respectée dans l’espace des transformations linéaires.
De manière analogue, une représentation d’une algèbre de Lie \(\mathfrak{g}\)est une application linéaire
\[\pi:\mathfrak{g} \rightarrow \mathfrak{gl}(V)\]
Où \(\mathfrak{gl}(V)\ \)désigne l’algèbre des endomorphismes de \(V\), qui respecte le crochet de Lie :
\[\pi(\lbrack X,Y\rbrack) = \lbrack\pi(X),\pi(Y)\rbrack,\forall X,Y \in \mathfrak{g}\]
Ainsi, les relations de commutation de l’algèbre sont préservées dans la représentation.
Le lien entre représentations du groupe et de l’algèbre est assuré par la fonction exponentielle. Si \(\rho\ \)est une représentation du groupe \(G\), on peut en dériver une représentation de l’algèbre de Lie \(\mathfrak{g\ }\)en considérant la dérivée en l’identité :
\[\pi(X) = {\frac{d}{dt}\rho\left( e^{tX} \right) \mid}_{t = 0}\]
Réciproquement, sous certaines conditions, une représentation de l’algèbre permet de reconstruire une représentation du groupe.
Un exemple fondamental est fourni par le groupe \(SU(2)\). Sa représentation la plus simple, dite représentation fondamentale, agit sur \(\mathbb{C}^{2\ }\)par multiplication matricielle. Les générateurs de l’algèbre \(\mathfrak{su}(2)\ \)sont alors représentés par les matrices de Pauli. De manière plus générale, \(SU(2)\ \)admet des représentations de dimension arbitraire, indexées par un demi-entier, qui jouent un rôle central en mécanique quantique pour décrire le spin des particules.
De même, le groupe \(SU(3)\ \)possède une représentation fondamentale sur \(\mathbb{C}^{3}\), qui intervient en chromodynamique quantique pour décrire les quarks. Les gluons, quant à eux, se transforment selon la représentation adjointe, associée à l’algèbre elle-même.
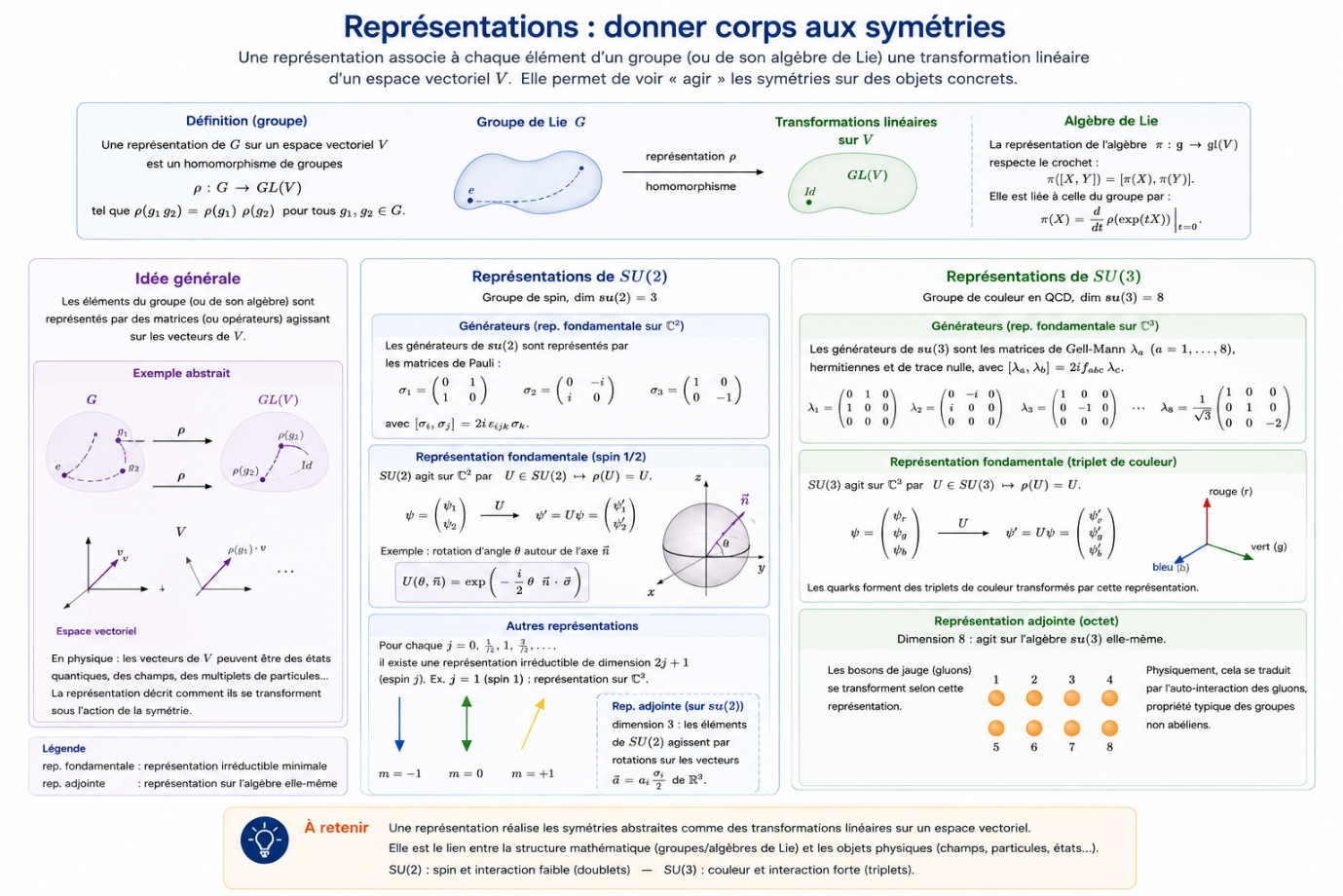
La notion de représentation permet ainsi de passer d’une description abstraite des symétries à leur réalisation concrète sur des espaces vectoriels. En physique, ces espaces sont souvent des espaces d’états ou des espaces de champs, et les représentations déterminent la manière dont les particules et les interactions se transforment sous l’action des symétries. Elle constitue donc un outil essentiel pour relier la structure mathématique des groupes de Lie à leur interprétation physique.
Conclusion
La théorie des groupes et des algèbres de Lie fournit aujourd’hui le langage mathématique fondamental de la physique moderne. En permettant de formaliser les symétries continues, elle révèle une structure profonde des lois physiques, où les propriétés géométriques et algébriques déterminent directement la dynamique des systèmes.
L’introduction des groupes de Lie permet de décrire les transformations globales associées aux symétries, tandis que les algèbres de Lie en donnent une description locale et infinitésimale, beaucoup plus maniable du point de vue calculatoire. Le lien entre ces deux structures, assuré par l’application exponentielle, montre comment des transformations infinitésimales peuvent engendrer des transformations finies, établissant ainsi une correspondance profonde entre géométrie et algèbre.
Les exemples de \(U(1)\), \(SU(2)\ \)et \(SU(3)\ \)illustrent de manière particulièrement frappante la portée physique de ces concepts. Derrière des structures mathématiques apparemment abstraites se cachent les symétries fondamentales du modèle standard : l’électromagnétisme, l’interaction faible et l’interaction forte. Les générateurs des algèbres de Lie deviennent alors les opérateurs infinitésimaux des symétries, tandis que les représentations décrivent concrètement la manière dont les particules et les champs se transforment sous leur action.
La notion de représentation joue à cet égard un rôle central. Elle constitue le point de contact entre l’abstraction mathématique et les objets physiques observables. Les particules élémentaires ne sont plus seulement caractérisées par leur masse ou leur charge, mais également par la représentation du groupe de symétrie selon laquelle elles se transforment. Ainsi, le spin, la charge électrique ou la couleur des quarks apparaissent comme les manifestations physiques de structures de représentation sous-jacentes.
Au-delà du modèle standard, les groupes et algèbres de Lie interviennent dans pratiquement tous les domaines de la physique théorique moderne : relativité générale, supersymétrie, théorie des cordes, théorie conforme ou gravitation quantique. Ils constituent un cadre unificateur dans lequel les lois physiques apparaissent comme la conséquence de principes de symétrie de plus en plus profonds.
L’étude des groupes de Lie illustre ainsi une idée devenue centrale en physique contemporaine : comprendre les symétries d’un système revient souvent à comprendre les lois fondamentales qui le gouvernent.