En 1915, Albert Einstein bouleverse radicalement notre compréhension de la gravitation avec sa théorie de la relativité générale. Jusqu’alors, depuis Newton, la gravité était envisagée comme une force agissant instantanément à distance entre deux corps massifs. Einstein rompt avec cette intuition : la gravité n’est pas une force, mais une manifestation géométrique.
La matière et l’énergie déforment l’espace et le temps, et les objets en mouvement suivent simplement les trajectoires naturelles, les géodésiques, tracées dans cet espace-temps courbe. Comme le dira le physicien John Wheeler bien plus tard : « La matière dit à l’espace-temps comment se courber ; l’espace-temps dit à la matière comment se mouvoir. »
Cette vision nouvelle a reçu de nombreuses confirmations expérimentales tout au long du 20ème siècle : l’explication précise de l’avance du périhélie de Mercure ; la déviation mesurable des rayons lumineux par la gravitation, observée lors d’éclipses ; la dilatation gravitationnelle du temps, aujourd’hui indispensable au fonctionnement du GPS ; et plus récemment, la détection directe des ondes gravitationnelles, ultime validation d’une prédiction d’Einstein formulée un siècle plus tôt.
Mais si la relativité générale est la théorie de référence pour comprendre la gravité, les galaxies et l’expansion de l’Univers, elle ne s’accorde pas avec l’autre grand édifice de la physique moderne : la mécanique quantique, qui décrit l’infiniment petit avec un succès comparable.
Avant d’aborder l’édifice cosmologique qu’elle a rendu possible, nous allons présenter les principes essentiels de cette théorie, en suivant une progression naturelle :
- Des trois relativités : de Galilée à Einstein
- Le principe d’équivalence : pilier conceptuel de la théorie
- L’espace-temps courbe : nouvelle géométrie de l’Univers
- La métrique : mesurer distances et temps dans un espace déformé
- Les géodésiques : les trajectoires naturelles
- Les équations d’Einstein : la gravité comme équation géométrique
- Exemples de métriques : Univers en expansion, trous noirs, etc.
Ces éléments formeront la base indispensable pour comprendre comment la relativité générale a permis l’essor des modèles cosmologiques modernes, en particulier celui du modèle dit ΛCDM actuellement en vigueur.
Relativité galiléenne / restreinte / générale
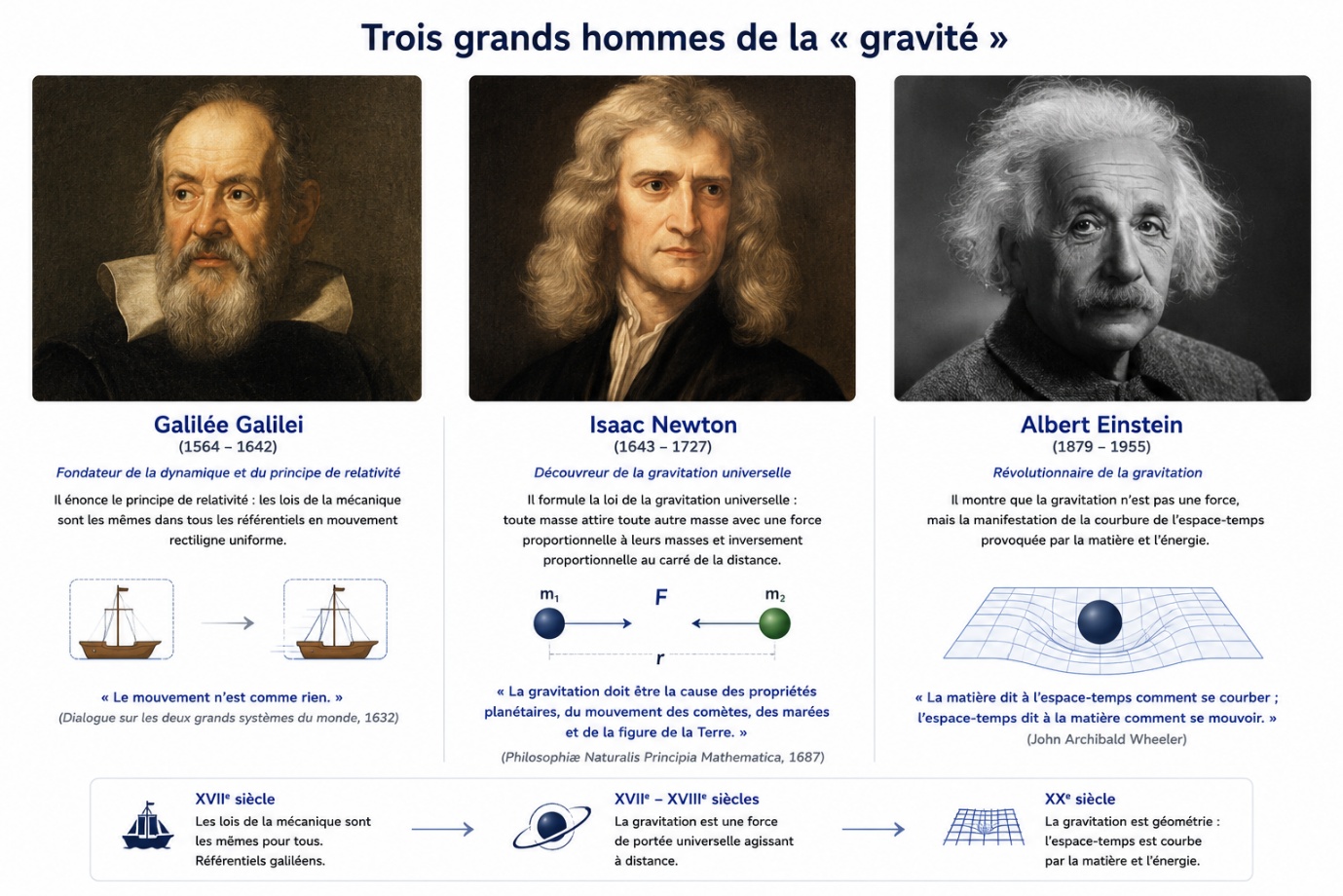
L’histoire de la relativité est celle d’une transformation progressive de notre manière de concevoir l’espace, le temps et le mouvement. D’abord formulée par Galilée, la relativité s’exprime comme une simple constatation : les lois du mouvement sont les mêmes pour tous les observateurs en déplacement uniforme.
Au début du 20ème siècle, Einstein élargit et radicalise cette idée. Avec la relativité restreinte (1905), il montre que l’espace et le temps ne sont pas absolus, mais intimement unifiés dans un espace-temps où la vitesse de la lumière est une constante universelle.
Dix ans plus tard, avec la relativité générale (1915), cette unification s’étend à la gravitation : l’espace-temps devient dynamique, capable de se courber sous l’effet de la matière et de l’énergie.
La relativité Galiléenne :
Contrairement à ce que l’on pourrait croire, le principe de relativité n’a pas été énoncé pour la première fois par Einstein. Celui-ci l’a étendu à l’ensemble des phénomènes physiques, mais c’est Galilée qui, dès 1632, en pose les fondations dans son Dialogue sur les deux grands systèmes du monde. Il le fait même avant que Newton ne formalise la loi universelle de la gravitation en 1687 dans ses Principia.
Galilée illustre son propos par une expérience de pensée devenue célèbre, mettant en scène des phénomènes quotidiens à bord d’un navire se déplaçant à vitesse constante : « Enfermez-vous… au fond d’un grand navire. Et là munissez-vous de mouches, de papillons et d’autres petits animaux semblables. Ayez aussi un grand bocal d’eau contenant des poissons, suspendez au plafond un petit seau dont l’eau, goutte à goutte, par un orifice, tombe dans un vase à col étroit, posé sur le sol… Le navire étant arrêté, observez soigneusement les petits animaux volant, les poissons nageant indifféremment de tous côtés, les gouttelettes d’eau tombant dans le vase situé sur le sol. Et vous-même, lancez quelque chose à un ami et constatez que dans n’importe quel sens vous obtiendrez le même résultat, si les distances sont égales… Maintenant faites marcher le navire, aussi vite que vous voudrez, pourvu que le mouvement soit uniforme, sans oscillation d’aucune sorte…
Vous ne discernerez aucun changement dans tous les effets précédents, et aucun d’eux ne vous renseignera si le navire est en marche ou s’il est arrêté… La cause de la permanence de tous ces effets, c’est que le mouvement uniforme est commun au navire et à ce qu’il contient, y compris l’air… Le mouvement est mouvement et agit comme mouvement en tant et seulement qu’il est en rapport avec les choses qui en sont privées ; mais en ce qui concerne celles qui y participent toutes également, il est sans effet ; il est comme s’il n’était pas. Le mouvement n’est comme rien ».
Cette expérience de pensée est d’une profondeur remarquable : il est impossible, par des expériences purement mécaniques, de distinguer un état de repos d’un mouvement rectiligne uniforme. Dit autrement : les lois de la mécanique sont invariantes dans tout référentiel dit galiléen.
Cette idée constitue le socle conceptuel de la physique classique et restera valable… jusqu’au début du 20ème siècle. Mais avec les progrès de l’électromagnétisme et l’apparition de la notion de vitesse de la lumière, les limites de la relativité galiléenne vont apparaître. Et c’est là qu’entre en scène Einstein, qui opérera une première révolution : la relativité restreinte.
La relativité restreinte (1905) :
Les lois de la mécanique newtonienne sont parfaitement compatibles avec le principe de référentiel galiléen. Il n’en est pas de même de la théorie de l’électromagnétisme énoncée par Maxwell en 1873.
Après les travaux de Young et Fresnel sur la nature ondulatoire de la lumière, se posait une question majeure : dans quel « milieu » une onde lumineuse se propage-t-elle ? Par analogie avec les ondes sonores ou marines, Maxwell et ses contemporains supposent l’existence d’un éther luminifère, présent partout et immobile, servant de référence absolue. Le cadre classique repose alors sur trois hypothèses : la lumière nécessite l’éther pour se propager ; l’éther est en repos absolu dans l’Univers ; la vitesse de la lumière est constante dans le vide.
Si l’éther existe, la Terre doit se déplacer à travers lui. En 1887, Michelson et Morley réalisent une expérience visant à détecter ce mouvement à l’aide d’un interféromètre. Résultat : Aucune variation mesurable de la vitesse de la lumière selon l’orientation ou la vitesse de la Terre. Un résultat en contradiction avec la vision classique… mais parfaitement compatible avec les équations de Maxwell.
Pendant une vingtaine d’années, plusieurs tentatives de sauvetage du concept d’éther sont proposées. Lorentz et Fitzgerald imaginent par exemple des contractions des longueurs dans le sens du mouvement. Mach, de son côté, suggère d’abandonner purement et simplement l’idée d’éther. Mais il manquait encore une interprétation physique cohérente. C’est Einstein qui, en 1905, apporte la clé : la vitesse de la lumière dans le vide est la même dans tous les référentiels inertiels.
Avec ce postulat et celui de la relativité galiléenne généralisée à toutes les lois de la physique, Einstein fonde la relativité restreinte, une théorie révolutionnaire qui jette à la fois l’éther et le temps absolu à la poubelle.
La relativité restreinte conduit à des conséquences profondes : le temps dépend de la vitesse du référentiel (dilatation du temps), les longueurs dépendent elles aussi du mouvement (contraction des longueurs), les événements simultanés dans un référentiel ne le sont pas nécessairement dans un autre. Plus un objet se déplace vite, en particulier lorsque sa vitesse tend vers c, la vitesse de la lumière, plus ces effets deviennent importants.
Temps et espace ne sont donc plus des grandeurs absolues et indépendantes, mais les composantes d’une même entité géométrique : l’espace-temps. Ce concept, introduit mathématiquement par Minkowski en 1908, prépare le terrain à une autre révolution : la relativité générale. Comme le dit Minkowski en 1908 : « Dorénavant, l’espace et le temps séparément sont condamnés à s’évanouir, et seule une sorte d’union entre les deux conservera une réalité indépendante. »
La relativité générale (1915) :
Einstein met en évidence très tôt une incompatibilité profonde entre la gravitation newtonienne et les principes de la relativité restreinte. Dans la théorie de Newton, la gravitation est une force agissant à distance : la Terre « sent » instantanément la position du Soleil, et la force exercée dépend uniquement de leurs masses et de leur séparation.
Mais ce caractère instantané pose un problème : aucune interaction ne peut se propager plus vite que la lumière, selon la relativité restreinte. Ainsi, dès 1907, Einstein entreprend de reformuler la gravitation afin qu’elle respecte les limites imposées par sa nouvelle vision de l’espace et du temps. Cette réflexion l’amène à développer, entre 1907 et 1915, la théorie de la relativité générale.
Alors que la relativité restreinte ne s’applique qu’aux référentiels inertiels (en mouvement rectiligne uniforme), la relativité générale étend le principe de relativité : toutes les lois de la physique, y compris la gravitation, doivent être valables dans n’importe quel référentiel, même accéléré.
Pour y parvenir, Einstein doit abandonner l’idée newtonienne d’une force gravitationnelle. Il s’appuie sur un outil mathématique nouveau pour lui : la géométrie différentielle, que son ami et collègue Marcel Grossmann l’aide à maîtriser. Dans les derniers mois de 1915, David Hilbert contribue à l’élaboration formelle du cadre mathématique et arrive, presque simultanément, à une formulation très proche des équations définitives.
La relativité générale englobe la gravitation newtonienne, qui apparaît comme une approximation valable lorsque les vitesses sont faibles et les champs gravitationnels peu intenses. L’idée centrale de la théorie est révolutionnaire : la gravitation n’est pas une force, mais la manifestation de la courbure de l’espace-temps causée par la matière et l’énergie. Les corps ne sont pas « tirés » par d’autres masses : ils suivent les géodésiques de l’espace-temps, c’est-à-dire ses trajectoires naturelles, telles qu’imposées par sa géométrie.
Principe d’équivalence d’Einstein
La notion de masse paraît familière : elle évoque spontanément une quantité de matière concentrée dans un volume donné. Pourtant, cette intuition masque deux définitions différentes que Newton a mises en évidence dès le 17ème siècle. La première, la masse inertielle, mesure la résistance d’un corps à la variation de son mouvement selon la relation fondamentale de la dynamique : plus un corps possède de masse, plus il est difficile de modifier son état de mouvement. La seconde, la masse gravitationnelle, intervient dans l’attraction qu’exercent deux corps l’un sur l’autre : elle traduit la manière dont un objet est sensible à la gravitation. Ce qui surprend Newton, et qu’une longue tradition expérimentale a confirmé, c’est que ces deux masses, issues de concepts physiquement distincts, sont égales pour tous les corps. C’est cette égalité qui explique l’observation, faite déjà par Galilée, que tous les objets tombent à la même vitesse dans le vide, quelles que soient leurs masses.
Einstein, au début du 20ème siècle, attribue à cette égalité une signification bien plus profonde qu’une simple coïncidence. Il affirme que masse inertielle et masse gravitationnelle ne sont pas seulement égales : elles sont identiques par nature. Cette affirmation constitue le cœur de ce qu’il nomme le principe d’équivalence. Pour l’illustrer, il imagine une expérience de pensée devenue emblématique : une personne enfermée dans un ascenseur dont les câbles se rompent soudainement. Durant la chute libre, si elle lâche un objet (une pomme par exemple) celui-ci reste en apesanteur à ses côtés. Localement, la gravité semble avoir disparu. Einstein en déduit qu’il est impossible d’effectuer une expérience purement mécanique permettant de distinguer un référentiel en chute libre d’un référentiel totalement dépourvu de gravité.
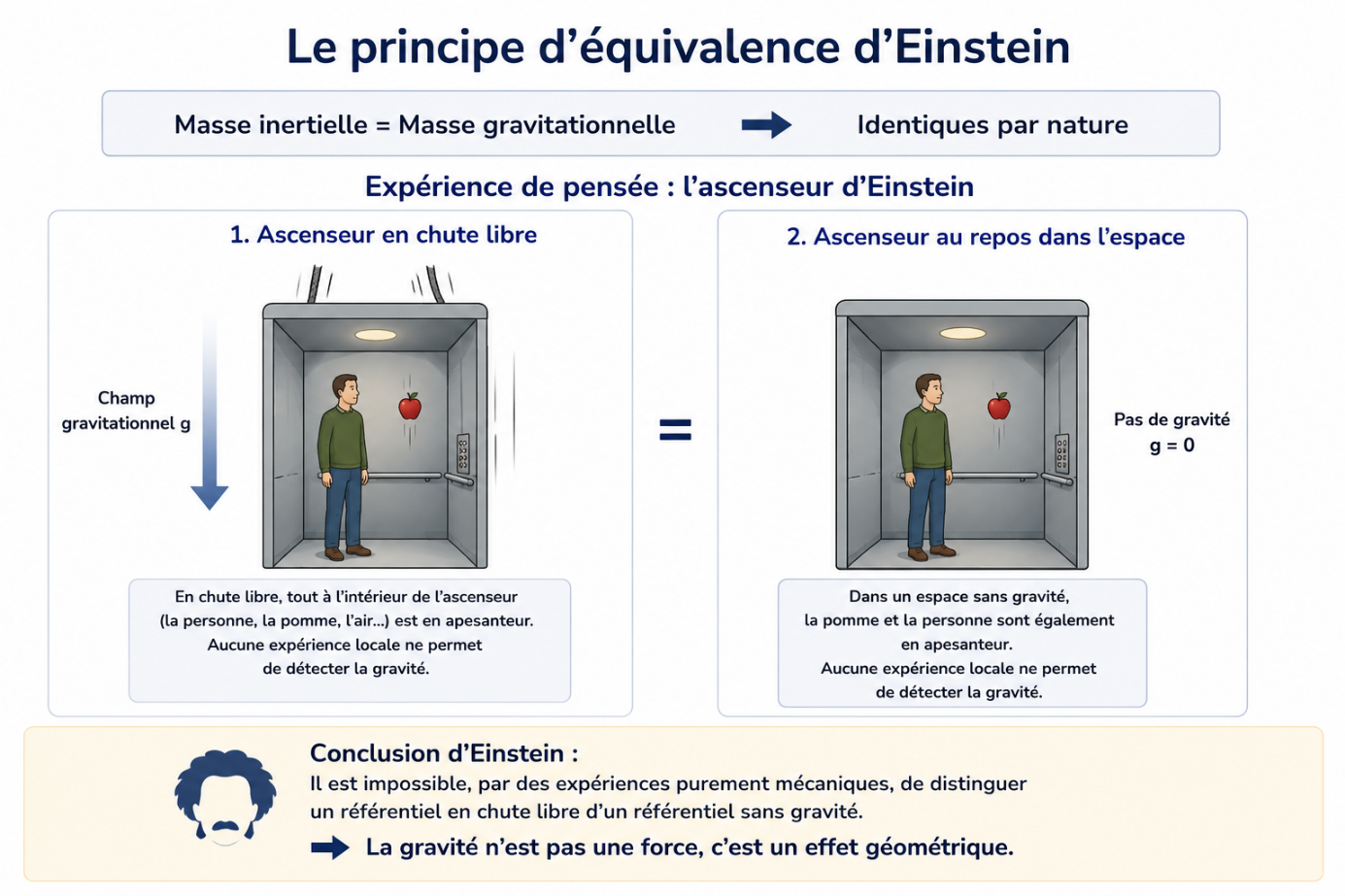
De cette idée découle une transformation conceptuelle majeure. Si la gravité se manifeste exactement de la même manière que l’inertie, au point qu’aucune expérience locale ne peut les distinguer, alors la chute libre n’est plus perçue comme un mouvement « contraint » par une force. Elle devient le mouvement naturel d’un corps laissé à lui-même, tout comme un corps non soumis à une force se meut en ligne droite à vitesse constante dans l’espace de Newton ou dans l’espace-temps de la relativité restreinte.
Einstein pousse cette idée à son extrême logique : si un observateur en chute libre ne ressent plus la gravité, c’est que la gravité n’est pas une force dans son référentiel. Dès lors, il n’est plus pertinent de la décrire par une action à distance à travers le vide, comme chez Newton. Il faut en chercher l’origine ailleurs. La seule manière de rendre compte du fait que tous les corps suivent les mêmes trajectoires en l’absence de forces est de considérer que ces trajectoires sont imposées par la structure même de l’espace-temps. La gravitation cesse alors d’être une interaction mystérieuse : elle devient une propriété géométrique de l’univers. La présence de matière ou d’énergie déforme l’espace-temps et les objets se contentent de suivre les chemins les plus « naturels » dans cette géométrie, autrement dit les géodésiques, l’équivalent des lignes droites dans un espace courbe.
Ainsi, le principe d’équivalence n’est pas un simple détail technique de la théorie : il en est la clé philosophique. Il impose l’abandon du paradigme newtonien où la gravité est une force, pour inaugurer celui d’Einstein où elle émerge de la courbure de l’espace-temps. La relativité générale naît de cette intuition audacieuse : la géométrie dicte le mouvement.
L’espace-temps courbe de la relativité générale
La relativité restreinte et la relativité générale bouleversent notre conception de l’espace et du temps. Dans la physique newtonienne, l’espace et le temps sont deux entités indépendantes : l’espace constitue un cadre absolu dans lequel se déplacent les corps, tandis que le temps s’écoule uniformément pour tous les observateurs, indépendamment de leur position et de leur mouvement. La relativité restreinte introduit un changement radical en unifiant ces deux notions en une seule structure à quatre dimensions, appelée espace-temps, où chaque événement est défini simultanément par un lieu et un instant. Cette approche implique que parler de temps ou d’espace séparément n’a plus de sens : seuls les événements et leurs relations sont physiques.
Le principe d’équivalence conduit Einstein à prolonger cette idée dans le cadre de la relativité générale. Selon ce principe, les lois de la physique sont identiques pour un observateur en chute libre dans un champ gravitationnel et pour un observateur en mouvement uniforme. L’espace-temps n’est plus simplement un cadre plat et euclidien : il devient courbe là où se trouve de la matière ou de l’énergie. La gravité n’est plus une force exercée à distance, mais la manifestation de cette courbure. La masse et l’énergie déforment l’espace-temps, et les corps se déplacent le long des trajectoires dictées par cette géométrie. Même des particules sans masse, comme les photons, suivent ces courbures, ce qui explique la déviation de la lumière par des objets massifs, un phénomène inconcevable dans la théorie de Newton.
Dans ce cadre, plusieurs concepts essentiels émergent. Un événement correspond à un point de l’espace-temps, défini par trois coordonnées spatiales et un instant précis, mesurés par un observateur muni de son horloge propre. Une ligne d’univers est la trajectoire d’un objet dans l’espace-temps, formée par l’ensemble des événements qu’il occupe successivement. Dans un espace-temps courbe, ces trajectoires ne sont pas des droites, mais des géodésiques, c’est-à-dire les chemins qui généralisent la notion de « ligne droite » à une variété riemannienne. En relativité générale, résoudre un problème revient donc à déterminer la géométrie de l’espace-temps, puis à calculer les géodésiques qui décrivent le mouvement naturel des corps dans cette géométrie.
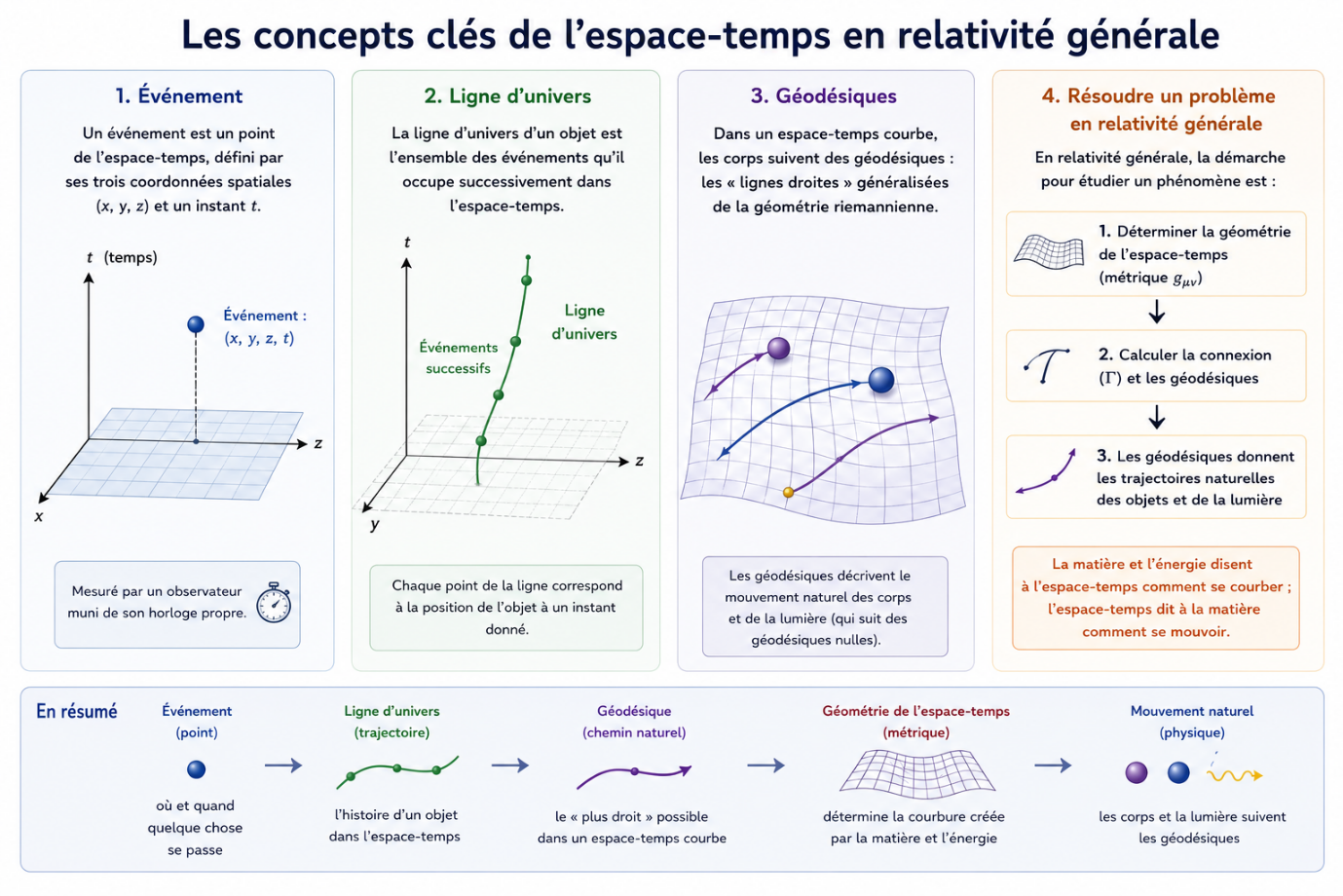
Cette vision révolutionnaire transforme notre compréhension de l’univers : la gravité cesse d’être une force mystérieuse et devient une propriété de l’espace-temps lui-même. La matière et l’énergie définissent la courbure, et cette courbure guide les trajectoires des corps. Les outils mathématiques de la géométrie différentielle et des variétés pseudo-riemanniennes permettent de formaliser cette idée, ouvrant la voie à l’équation d’Einstein et à toutes les prédictions spectaculaires de la relativité générale.
Métrique pseudo-riemannienne
Pour décrire rigoureusement l’espace-temps courbe de la relativité générale, il faut s’appuyer sur des outils mathématiques capables de généraliser la géométrie euclidienne à des espaces courbes. Ces outils relèvent de la géométrie différentielle, et plus précisément du concept de variété riemannienne, qui permet de représenter des espaces dont la notion de distance et de courbure peut varier d’un point à l’autre.
Dans le cadre de la relativité générale, l’espace-temps n’est pas seulement un espace tridimensionnel : il comporte trois dimensions spatiales et une dimension temporelle, et la manière dont on mesure les distances et les intervalles de temps dépend de la présence de matière et d’énergie. Pour rendre ce concept accessible, il est utile de commencer par des exemples simples de variétés riemanniennes, comme la surface d’une sphère, avant de généraliser à l’espace-temps et d’introduire la métrique pseudo-riemannienne, qui prend en compte la dimension temporelle et la signature particulière de l’espace-temps.
Cette partie se propose donc de présenter d’abord ce qu’est une variété riemannienne, d’illustrer cette notion par un exemple concret, puis d’expliquer les concepts d’espace tangent, de connexion et de transport parallèle, pour enfin introduire la métrique pseudo-riemannienne qui est au cœur de la relativité générale.
Variété riemannienne
Une variété différentielle est un espace qui, localement, ressemble à un espace euclidien de dimension donnée, mais qui peut présenter une structure globale beaucoup plus complexe. En d’autres termes, autour de chaque point, il est possible de définir un système de coordonnées dans lequel les calculs différentiels habituels sont possibles, comme sur une portion de plan ou d’espace tridimensionnel. Cette idée permet d’étudier des espaces courbes ou des objets géométriques complexes tout en conservant la possibilité de faire du calcul différentiel.
Sur une variété différentielle, le calcul différentiel classique ne peut pas être appliqué de manière illimitée. En particulier, il est impossible de définir directement la courbure de la variété ou les géodésiques qui la parcourent, deux concepts essentiels pour la relativité générale. L’enjeu est donc d’introduire une structure supplémentaire qui permette de mesurer des distances et d’appréhender la courbure de l’espace considéré.
Pour une fonction numérique définie sur une variété, on peut naturellement définir la dérivée directionnelle et la différentielle. Mais aller plus loin nécessite de comparer des vecteurs situés en des points différents. Or chaque point possède son propre espace tangent, et rien n’impose un lien direct entre ces espaces voisins. Sans structure supplémentaire, il est donc impossible de poursuivre les dérivations et d’étudier la géométrie de l’espace de manière cohérente.
Cette difficulté peut être surmontée en introduisant une connexion entre les espaces tangents, qui définit un moyen de transporter et comparer des vecteurs d’un point à un autre. Dans le cas le plus fréquent, lorsqu’une métrique riemannienne est donnée, il existe une connexion canonique associée, la connexion de Levi-Civita, qui permet de définir les dérivées covariantes et donc de calculer courbures et géodésiques.
Ainsi, une variété riemannienne est une variété différentielle munie d’une métrique, c’est-à-dire d’un outil permettant de mesurer le produit scalaire de deux vecteurs tangents en un même point. Cette métrique permet de définir la longueur d’un chemin entre deux points et, par extension, de déterminer les géodésiques, les courbes qui représentent les « plus courts chemins » sur la variété. Pour rendre ces notions concrètes, nous commencerons par l’exemple simple de la sphère avant de généraliser ces concepts à l’espace-temps de la relativité générale et à la métrique pseudo-riemannienne.
Exemple de la sphère S2 dans R3 (globe terrestre) :
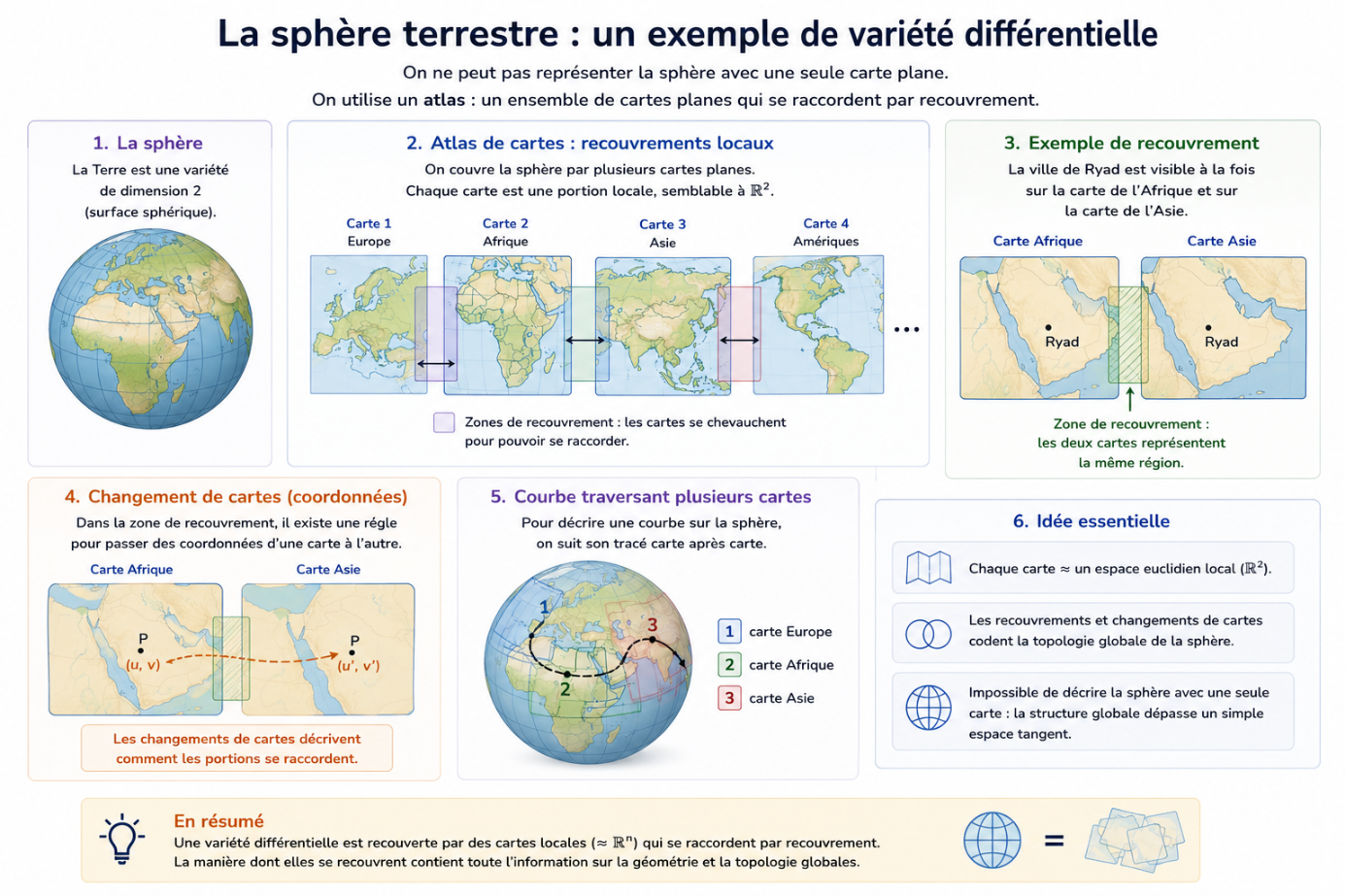
La sphère terrestre constitue un exemple concret de variété différentielle. Pour s’y repérer, on utilise des cartes géographiques planes, regroupées dans un atlas. Chaque carte fournit les informations nécessaires pour se raccorder aux cartes voisines, créant ainsi une connexion entre les différents « espaces tangents » locaux. Par exemple, la carte de l’Afrique et celle de l’Asie peuvent toutes deux représenter Ryad, ce qui illustre la nécessité de zones de chevauchement pour relier correctement les cartes. L’assemblage de toutes ces cartes, avec leurs règles de recouvrement, constitue ce que l’on appelle un atlas mathématique.
Chaque carte correspond à une portion locale de la variété qui ressemble à un espace euclidien, ici \(\mathbb{R}^{2}\). Les changements de cartes renseignent sur la manière dont ces portions se raccordent entre elles, permettant de décrire une courbe qui traverse plusieurs cartes. Il est impossible de représenter une variété complexe comme la sphère avec une seule carte plane : la structure globale dépasse celle d’un simple espace tangent. La topologie de la variété est donc entièrement codée dans la manière dont les cartes de l’atlas se recouvrent.
Pour passer de la variété différentielle à une variété riemannienne, il faut lui ajouter une métrique, c’est-à-dire une structure permettant de mesurer des distances locales. Dans l’espace euclidien \(\mathbb{R}^{3\ }\)muni des coordonnées cartésiennes, l’intervalle élémentaire est donné par :
\[ds^{2} = dx^{2} + dy^{2} + dz^{2}.\]
Pour la sphère, on préfère utiliser les coordonnées sphériques : \(\rho\ \)le rayon constant de la sphère, \(\theta\ \)la colatitude et \(\phi\ \)la longitude. L’intervalle élémentaire s’écrit alors :
\[ds^{2} = d\rho^{2} + \rho^{2}(d\theta^{2} + {\sin}^{2}\theta\text{ }d\phi^{2}).\]
Sur la sphère, \(\rho\ \)étant constant, l’intervalle se réduit à la métrique sur la surface. La géodésique, c’est-à-dire le chemin de plus courte distance entre deux points, est la courbe qui minimise l’intégrale de cet intervalle le long de son tracé. Sur une sphère, les géodésiques sont les grands cercles, intersections de la sphère avec un plan passant par son centre.
Un exemple concret permet d’illustrer immédiatement le rôle des géodésiques sur une sphère : les trajectoires suivies par les avions long-courriers. Lorsqu’on observe sur une carte plane un trajet entre Paris et Tokyo, la route aérienne semble souvent étrange. Au lieu de suivre une ligne « horizontale » traversant simplement l’Europe et l’Asie, les avions empruntent fréquemment une trajectoire qui remonte vers les hautes latitudes, parfois en passant au voisinage de la Sibérie ou même de l’Arctique. Sur une projection plane classique, cette route paraît plus longue et courbée. Pourtant, elle correspond en réalité au chemin le plus court sur la surface de la Terre.
La raison est que la Terre est approximativement sphérique. Or, sur une sphère, les plus courts chemins ne sont pas des lignes droites tracées sur une carte plane, mais des géodésiques, c’est-à-dire des arcs de grands cercles. Une projection cartographique déforme nécessairement les distances et les trajectoires, car il est impossible de représenter parfaitement une surface courbe sur un plan. Ainsi, le trajet optimal entre Paris et Tokyo suit approximativement un grand cercle passant par les régions polaires. Les compagnies aériennes utilisent précisément ces géodésiques pour minimiser la distance parcourue, réduire la consommation de carburant et diminuer le temps de vol.
Cet exemple montre concrètement qu’une géodésique dépend entièrement de la géométrie de l’espace considéré. Dans un espace euclidien plan, la géodésique est une ligne droite. Sur une sphère, ce sont les grands cercles. En relativité générale, cette idée est généralisée à l’espace-temps lui-même : les objets suivent les géodésiques imposées par la géométrie courbe de l’espace-temps, exactement comme les avions suivent naturellement les grands cercles à la surface de la Terre.
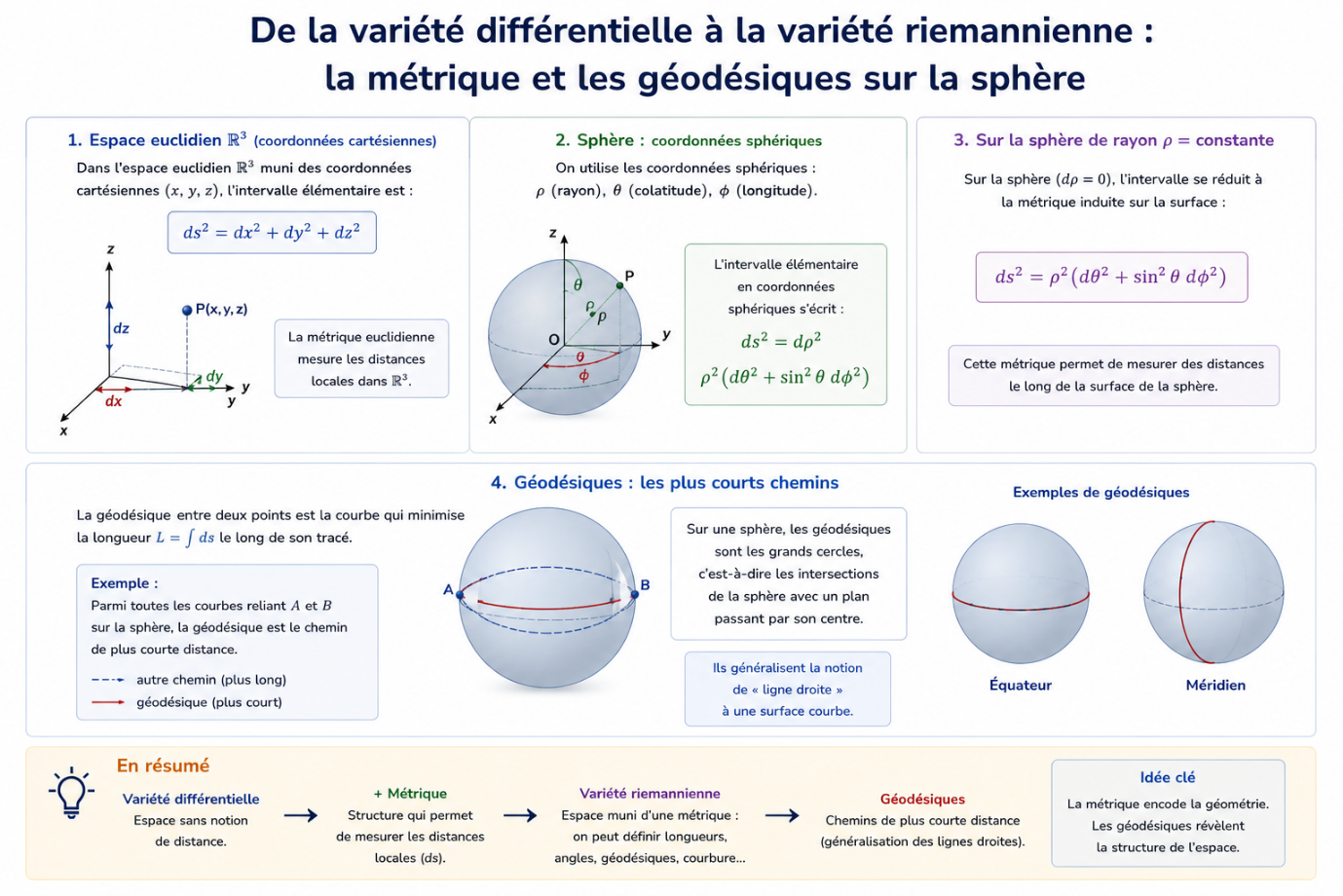
Cette géométrie implique également des différences fondamentales avec la géométrie euclidienne. Par exemple, la somme des angles d’un triangle tracé avec des géodésiques dépasse toujours 180°, et deux géodésiques ne peuvent jamais être parallèles au sens euclidien : elles se coupent toujours en deux points sur la sphère. L’exemple de la sphère montre ainsi concrètement que certaines notions de la géométrie traditionnelle doivent être adaptées lorsqu’on travaille dans des espaces courbes, et illustre de manière simple les concepts de variété riemannienne, de métrique et de géodésique que l’on retrouvera dans l’espace-temps de la relativité générale.
Espaces tangents / connexion / transport parallèle
Pour comprendre la géométrie des variétés riemanniennes, il faut introduire les notions d’espaces tangents, de connexion et de transport parallèle. Considérons d’abord une surface courbe, c’est-à-dire une variété de dimension deux. Prenons un point sur cette surface et imaginons un vecteur vitesse en ce point. Ce vecteur ne « vit » pas dans la surface elle-même, mais dans un espace tangent en ce point : on peut visualiser ce plan tangent comme une approximation locale de la surface autour du point considéré.
Définir rigoureusement un vecteur tangent nécessite d’abord de définir un vecteur tangent à une courbe passant par le point, puis d’étendre cette définition à l’ensemble des vecteurs tangents à toutes les courbes passant par ce point. L’espace tangent ainsi obtenu possède la même dimension que la variété. Pour décrire toutes les vitesses possibles en tous points de la surface, il faut donc disposer d’un plan tangent en chaque point. L’ensemble de la surface et de tous ses espaces tangents constitue ce que l’on appelle le fibré tangent.
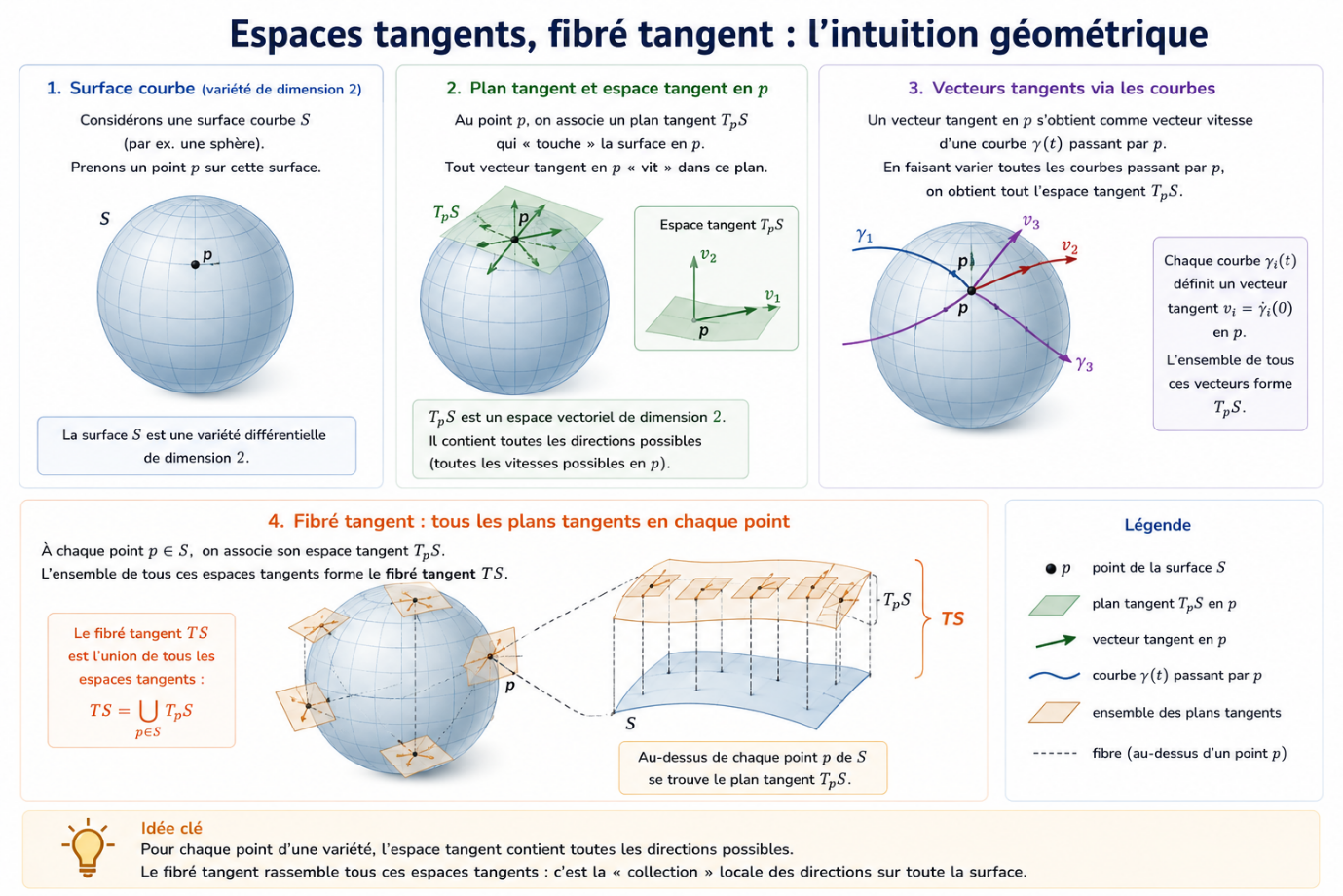
Le problème central est que, sur une surface courbe, il n’existe pas de manière naturelle de comparer un vecteur tangent en un point \(M\ \)avec un vecteur tangent en un autre point \(M’\). Sur une surface plane, cette comparaison est triviale, mais dès que la surface est courbée, les vecteurs appartiennent à des espaces tangents distincts et il n’existe pas de correspondance évidente entre eux. Or, définir une ligne droite ou une géodésique, c’est-à-dire une trajectoire qui avance toujours de manière « parallèle à elle-même », nécessite de pouvoir transporter des vecteurs d’un point à un autre de manière cohérente.
C’est là qu’intervient la notion de connexion, un outil mathématique qui permet de relier les espaces tangents de points voisins et de transporter un vecteur d’un espace tangent à un autre. Cette opération est appelée transport parallèle. Une fois qu’une connexion est définie, il devient possible de comparer les vecteurs d’un point à un autre, et donc de définir la dérivée d’un champ de vecteurs le long d’une courbe, appelée dérivée covariante associée à la connexion. La dérivée covariante mesure comment un vecteur change lorsqu’il est transporté parallèlement sur la variété.
Sur une variété riemannienne, c’est-à-dire une variété munie d’une métrique permettant de mesurer distances et angles, il existe une connexion naturelle, appelée connexion de Levi-Civita. Elle est caractérisée par deux propriétés essentielles : elle est compatible avec la métrique, et elle est sans torsion. Grâce à cette connexion, les géodésiques sont exactement les courbes de plus court chemin pour lesquelles le vecteur vitesse reste parallèle à lui-même selon le transport parallèle. C’est cette structure qui permet de généraliser la notion de « ligne droite » dans un espace courbe et qui constitue un des fondements de la relativité générale.
La métrique pseudo-riemannienne
La métrique pseudo-riemannienne est l’outil fondamental qui permet de décrire l’espace-temps en relativité générale. Il s’agit d’une métrique définie sur une variété de dimension quatre, correspondant aux trois dimensions de l’espace et à la dimension du temps. Pour la comprendre, il est utile de commencer par rappeler la notion de métrique riemannienne.
En un point donné d’une variété différentielle, nous avons vu que l’on peut définir des vecteurs dans le plan tangent. Sur ce plan tangent, il est possible de définir un produit scalaire entre deux vecteurs, c’est-à-dire une forme bilinéaire symétrique permettant de mesurer des longueurs et des angles. Cette structure définit une métrique riemannienne, notée \(g\), qui généralise la notion de distance euclidienne aux espaces courbes.
Si l’on choisit une base de vecteurs \(\left\{ e_{i} \right\}\ \)dans le plan tangent, et des coordonnées associées \(x^{i}\)(i variant de 0 à 3), on définit les coefficients de la métrique par \(g_{ij} = g(e_{i},e_{j})\). Cette matrice symétrique à 16 coefficients ne comporte que 10 coefficients indépendants. Ces coefficients dépendent à la fois du point considéré sur la variété et du système de coordonnées choisi : \(g_{ij} = g_{ij}(x^{0},x^{1},x^{2},x^{3})\). L’intervalle élémentaire \(ds\), mesurant la distance infinitésimale entre deux points voisins, s’écrit alors :
\[ds^{2} = g_{ij}\text{ }dx^{i}dx^{j}\]
Ici, on utilise la convention de sommation d’Einstein, très pratique en relativité générale. Cette convention stipule que lorsqu’un indice apparaît deux fois dans un terme (une fois en haut et une fois en bas ou deux fois en bas selon les conventions), il est sous-entendu qu’on fait la somme sur toutes les valeurs de cet indice. Par exemple, dans notre cas, \(i\) et \(j\ \)varient de 0 à 3 et la notation \(g_{ij}dx^{i}dx^{j}\)représente en réalité la somme des 16 termes \(g_{00}dx^{0}dx^{0} + g_{01}dx^{0}dx^{1} + \cdots + g_{33}dx^{3}dx^{3}\). Cette notation permet de simplifier considérablement les formules et rend le calcul plus maniable. Cette expression peut être vue comme une généralisation du théorème de Pythagore à des espaces courbes et de dimension quelconque.
Une métrique pseudo-riemannienne est une extension de cette notion, dans laquelle la forme bilinéaire n’est plus définie positive. Autrement dit, certains axes de l’espace peuvent avoir des « normes négatives ». En relativité générale, c’est l’axe du temps qui possède un signe opposé à celui des axes de l’espace. On peut adopter deux conventions de signe : soit l’axe du temps est de norme positive et les axes de l’espace négatifs, soit l’axe du temps est négatif et les axes de l’espace positifs. Les deux conventions sont équivalentes et utilisées indifféremment.
Cette subtilité entraîne une conséquence fondamentale : un vecteur peut avoir une norme nulle sans être le vecteur nul, ce qui permet de décrire les trajectoires de la lumière dans l’espace-temps. Ainsi, la pseudo-métrique fournit le cadre mathématique pour distinguer trajectoires de particules massives (avec \(ds^{2} > 0\)) et trajectoires lumineuses (avec \(ds^{2} = 0\)).
Pour mieux visualiser ces notions, il est utile de se tourner vers l’exemple le plus simple : la métrique de Minkowski, qui décrit l’espace-temps de la relativité restreinte. Elle illustre clairement la structure pseudo-riemannienne et constitue la base à partir de laquelle Einstein généralise la géométrie de l’espace-temps pour tenir compte de la gravitation.
En résumé, toute la géométrie de l’espace-temps est entièrement codée dans les coefficients de la métrique \(g_{ij}\). Ces coefficients dépendent des coordonnées spatiales et temporelles \(x^{0},x^{1},x^{2},x^{3}\ \)et contiennent toutes les informations nécessaires pour décrire la courbure de l’espace-temps en un point donné. Connaître la métrique \(g_{ij}\)revient donc à connaître la structure géométrique de l’espace-temps et, par extension, les trajectoires que suivront les particules et la lumière dans ce cadre. Dans la relativité générale, résoudre un problème revient essentiellement à déterminer ces coefficients en fonction de la distribution de matière et d’énergie, puis à en déduire les trajectoires naturelles, c’est-à-dire les géodésiques.
Géodésiques dans l’espace-temps
On peut définir une géodésique de deux façons équivalentes. La première consiste à considérer la géodésique comme la courbe reliant deux points qui minimise la distance parcourue, c’est-à-dire le chemin le plus « court » possible dans la variété courbe. La seconde définition repose sur le concept de transport parallèle : une géodésique est alors une courbe le long de laquelle le vecteur vitesse d’un objet est conservé, c’est-à-dire qu’il est transporté parallèlement à lui-même selon la connexion choisie.
Comme nous l’avons vu précédemment, sur une variété riemannienne, il existe une connexion particulière qui rend cohérentes ces deux définitions : la connexion de Levi-Civita, qui est compatible avec la métrique et sans torsion. En d’autres termes, la métrique permet de mesurer les distances, tandis que la connexion définit comment comparer des vecteurs situés en des points distincts de la variété. En combinant ces deux structures de manière cohérente, on obtient une définition unique des géodésiques de l’espace-temps.
Pour mieux comprendre l’intuition des coefficients de Christoffel, imaginons que nous voulons transporter un vecteur le long d’une surface courbe, comme une sphère. Lorsque le vecteur se déplace, il doit « pivoter » légèrement pour rester parallèle à lui-même par rapport à la surface. Les coefficients de Christoffel codent exactement ces ajustements locaux : ils indiquent comment les coordonnées changent pour maintenir le vecteur parallèle dans l’espace tangent. On peut les voir comme des « instructions de correction » qui tiennent compte de la courbure locale de la variété.
Dans un système de coordonnées \(x^{i}\), les géodésiques sont alors données par les équations différentielles :
\[\frac{d^{2}x^{i}}{d\lambda^{2}} + \Gamma_{jk}^{i}\frac{dx^{j}}{d\lambda}\frac{dx^{k}}{d\lambda} = 0\]
Où \(\lambda\)est un paramètre le long de la courbe (comme le temps propre pour une particule massive). Les coefficients de Christoffel sont entièrement déterminés par la métrique \(g_{ij}\)selon la relation :
\[\Gamma_{jk}^{i} = \frac{1}{2}g^{il}\left( \frac{\partial g_{lj}}{\partial x^{k}} + \frac{\partial g_{lk}}{\partial x^{j}} – \frac{\partial g_{jk}}{\partial x^{l}} \right)\]
Ainsi, connaître la métrique revient à connaître les géodésiques : les objets massifs suivent les géodésiques « temporelles », tandis que les photons suivent les géodésiques « nulles ». Cette formalisation explique pourquoi les trajectoires des corps et de la lumière dans l’espace-temps courbe ne dépendent pas d’une force au sens newtonien, mais uniquement de la structure géométrique de l’espace-temps lui-même.
Pour rendre ces concepts plus concrets, reprenons l’exemple de la sphère, déjà utilisé pour introduire la notion de variété riemannienne. Sur la sphère terrestre, les « lignes droites » au sens riemannien sont les grands cercles. Imaginons que vous souhaitiez suivre la trajectoire la plus courte entre deux points sur la surface de la Terre, par exemple entre Paris et New York. Cette trajectoire correspond à une géodésique sur la sphère : elle suit un grand cercle et non une ligne droite tracée sur une carte plane.
Parenthèse mathématique – L’équation des géodésiques sur la sphère |
|---|
Si l’on transporte un vecteur tangent à la surface le long de cette trajectoire (par exemple un vecteur indiquant votre direction de déplacement), il doit changer légèrement d’orientation pour rester parallèle à lui-même par rapport à la sphère. Cette variation locale de direction est exactement ce que codent les coefficients de Christoffel. Sur la sphère, ces coefficients indiquent comment ajuster le vecteur tangent à mesure que l’on se déplace le long de la géodésique pour rester « parallèle » sur la surface courbe.
De manière plus visuelle, imaginez que vous tenez une flèche ou un bâton sur le globe et que vous la faites glisser le long de la trajectoire Paris-New York sans la faire tourner par rapport à la surface. Même si elle semble tourner par rapport à un observateur externe (par exemple quelqu’un regardant la Terre depuis l’espace), elle reste parallèle localement sur la sphère. Les coefficients de Christoffel sont précisément les outils mathématiques qui permettent de calculer ces rotations locales nécessaires pour que le vecteur conserve sa direction par rapport à la géométrie de la surface.
Ainsi, sur la sphère comme dans l’espace-temps courbe de la relativité générale, les géodésiques représentent les trajectoires « naturelles » des objets, et les coefficients de Christoffel traduisent localement la courbure de l’espace dans laquelle ces objets évoluent. Connaître la métrique et ses coefficients revient donc à connaître toutes les géodésiques, et donc toutes les trajectoires possibles des corps et de la lumière dans cet espace.
L’équation d’Einstein de la relativité générale
L’équation d’Einstein constitue le cœur de la relativité générale. Elle relie la courbure de l’espace-temps à la distribution de matière et d’énergie qu’il contient. En d’autres termes, elle formalise mathématiquement l’idée centrale d’Einstein : la matière et l’énergie déforment la géométrie de l’espace-temps, et cette géométrie dicte ensuite le mouvement des corps et de la lumière.
Pour formuler cette relation, il faut deux éléments fondamentaux :
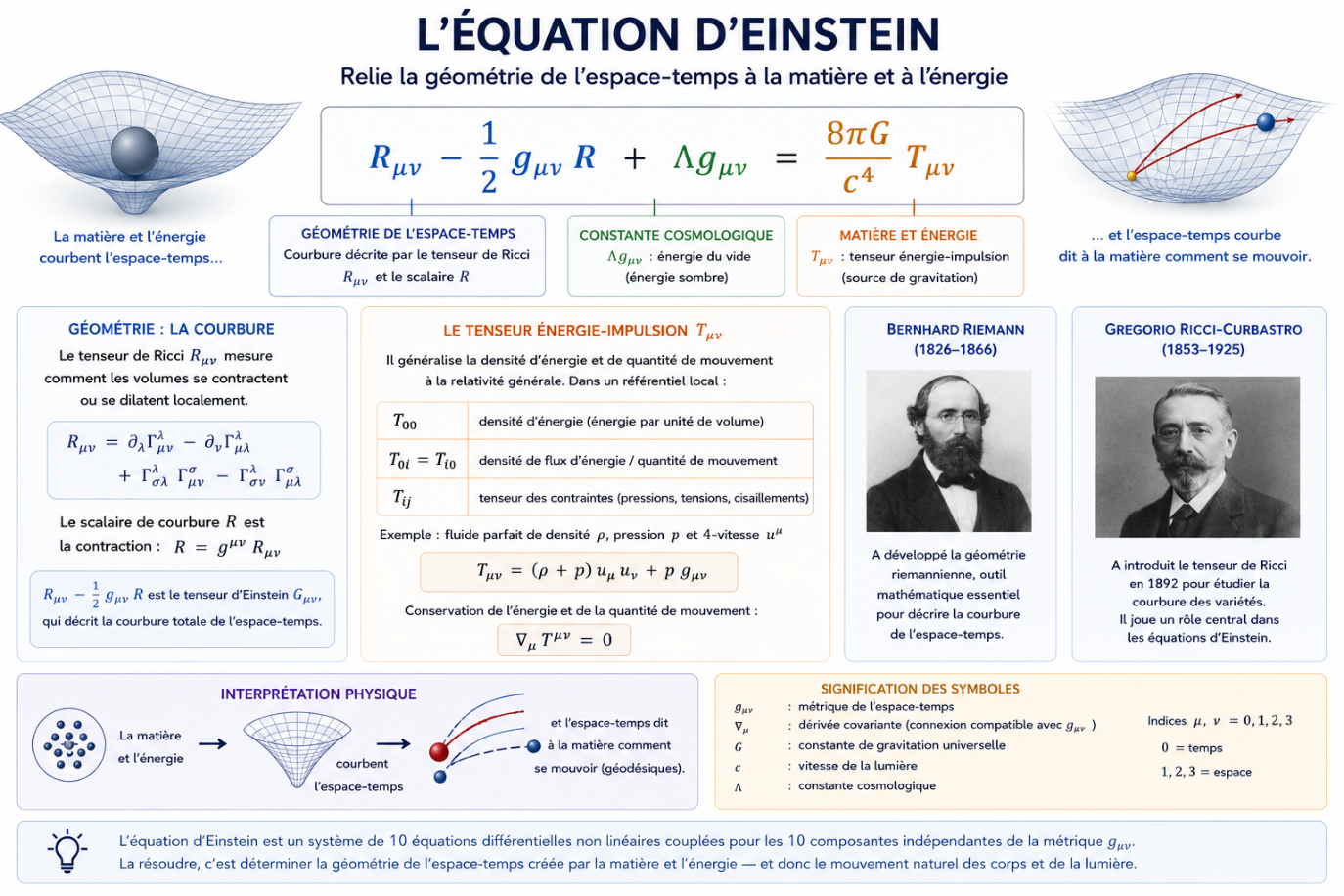
- La géométrie de l’espace-temps, codée par la métrique \(g_{\mu\nu}\ \)et ses dérivées, qui permettent de calculer la courbure locale de l’espace-temps. Les grandeurs qui expriment cette courbure sont le tenseur de Ricci \(R_{\mu\nu}\)et le tenseur scalaire de courbure \(R\), construits à partir des coefficients de Christoffel et de la métrique.
- La distribution de matière et d’énergie, représentée par le tenseur énergie-impulsion \(T_{\mu\nu}\). Ce tenseur généralise la notion de densité de masse et de flux d’énergie dans l’espace-temps, et inclut aussi bien la matière classique, les champs électromagnétiques, que d’autres formes d’énergie.
L’équation d’Einstein s’écrit alors de manière compacte :
\[\mathbf{R}_{\mathbf{\mu\nu}}\mathbf{-}\frac{\mathbf{1}}{\mathbf{2}}\mathbf{g}_{\mathbf{\mu\nu}}\mathbf{R +}\mathbf{\Lambda}\mathbf{g}_{\mathbf{\mu\nu}}\mathbf{=}\frac{\mathbf{8\pi G}}{\mathbf{c}^{\mathbf{4}}}\mathbf{T}_{\mathbf{\mu\nu}} \]Où :
- \(R_{\mu\nu} – \frac{1}{2}g_{\mu\nu}R\ \)décrit la courbure de l’espace-temps,
- \(\Lambda g_{\mu\nu}\ \)est la constante cosmologique, introduite par Einstein puis réinterprétée pour tenir compte de l’énergie sombre,
- \(\frac{8\pi G}{c^{4}}T_{\mu\nu}\) relie cette courbure à la matière et à l’énergie, avec \(G\ \)la constante de gravitation et \(c\ \)la vitesse de la lumière.
On peut considérer l’équation d’Einstein comme le pendant relativiste de l’équation fondamentale de la dynamique de Newton, \(F = ma\). Dans la mécanique classique, la force est directement proportionnelle à l’accélération d’un corps. Dans la relativité générale, la « force » gravitationnelle n’existe plus en tant que telle. Elle est remplacée par la géométrie de l’espace-temps, et l’équation d’Einstein relie cette géométrie à la matière et à l’énergie présentes dans l’univers. La trajectoire des corps résulte alors naturellement de cette géométrie, selon le principe des géodésiques.
Le tenseur de Ricci \(\mathbf{R}_{\mathbf{\mu\nu}}\ \)représente une contraction du tenseur de Riemann et décrit la manière dont l’espace-temps se courbe localement en réponse à la matière et à l’énergie. Il encode essentiellement l’information sur la courbure qui provoque la convergence ou la divergence des trajectoires de particules et de rayons lumineux.
Le tenseur de Ricci \(R_{\mu\nu}\ \)se calcule directement à partir des coefficients de Christoffel \(\Gamma_{\mu\nu}^{\lambda}\ \)qui codent la connexion compatible avec la métrique. Il s’agit essentiellement d’une contraction du tenseur de Riemann, ce dernier décrivant la façon dont un vecteur est dévié lorsqu’il est transporté parallèlement le long d’une boucle infiniment petite. Concrètement, on exprime le tenseur de Ricci par la formule :
\[R_{\mu\nu} = \partial_{\lambda}\Gamma_{\mu\nu}^{\lambda} – \partial_{\nu}\Gamma_{\mu\lambda}^{\lambda} + \Gamma_{\sigma\lambda}^{\lambda}\Gamma_{\mu\nu}^{\sigma} – \Gamma_{\sigma\nu}^{\lambda}\Gamma_{\mu\lambda}^{\sigma}.\]
On voit apparaître quatre termes : deux termes de dérivées partielles des coefficients de Christoffel, qui représentent comment la connexion change localement, et deux termes quadratiques en \(\Gamma\), qui prennent en compte les interactions entre les différentes directions de l’espace-temps.
Ainsi, une fois la métrique choisie et les coefficients de Christoffel calculés, le tenseur de Ricci peut être déterminé point par point. Il codifie l’information sur la courbure locale de l’espace-temps dans toutes les directions, tout en ne conservant que deux indices, ce qui le rend directement exploitable dans l’équation d’Einstein.
Le tenseur de Ricci résume l’information sur la courbure de l’espace-temps en un point donné tout en conservant les directions principales à deux indices. Pour obtenir une mesure plus globale de cette courbure, indépendante des directions particulières, on peut effectuer une contraction supplémentaire de ce tenseur. Cette opération consiste à sommer le tenseur de Ricci sur ses deux indices en utilisant l’inverse de la métrique \(g^{\mu\nu}\). Le résultat est un scalaire, appelé tenseur scalaire de courbure ou simplement courbure scalaire \(R\).
Cette quantité unique fournit une mesure globale de la façon dont l’espace-temps est courbé en chaque point. Alors que le tenseur de Ricci conserve une information directionnelle, le scalaire de courbure donne une vue « d’ensemble », analogue à mesurer la courbure moyenne d’une surface au lieu de ses courbures locales dans chaque direction. C’est ce scalaire qui intervient directement dans l’équation d’Einstein aux côtés du tenseur de Ricci pour relier géométrie et matière.
Le tenseur énergie-impulsion \(\mathbf{T}_{\mathbf{\mu\nu}}\ \)codifie la répartition de l’énergie, de l’impulsion et des contraintes dans l’espace-temps. Il est défini de manière à généraliser le concept classique d’énergie et de moment cinétique à la relativité générale, où l’espace et le temps sont indissociables. Chaque composante de ce tenseur a une signification physique précise :
- \(T_{00}\ \)correspond à la densité d’énergie dans le référentiel choisi. Pour un fluide parfait, c’est essentiellement la masse/énergie par unité de volume.
- \(T_{0i}\ \)et \(T_{i0}\ \)représentent le flux d’énergie et la densité de moment dans la direction \(i\).
- \(T_{ij\ }\)(avec \(i,j = 1,2,3\)) décrit les contraintes ou pressions exercées dans l’espace, incluant les forces internes dans un fluide ou une matière solide.
Pour définir le tenseur énergie-impulsion dans un modèle physique donné, on part des propriétés de la matière ou du champ considéré. Par exemple, pour un fluide parfait de densité \(\rho\), de pression \(p\ \)et de 4‑vitesse \(u^{\mu}\), on écrit :
\[T_{\mu\nu} = (\rho + p){\ u}_{\mu}u_{\nu} + p\text{ }g_{\mu\nu},\]
Où \(g_{\mu\nu}\ \)est la métrique de l’espace-temps et \(u_{\mu}\ \)la 4‑vitesse du fluide. Cette forme garantit que le tenseur est symétrique et satisfait la conservation de l’énergie et de l’impulsion, exprimée par la dérivée covariante nulle :
\[\nabla_{\mu}T^{\mu\nu} = 0.\]
Dans le cas de champs électromagnétiques, le tenseur énergie-impulsion se construit à partir du tenseur du champ électromagnétique \(F_{\mu\nu}\), ce qui montre que toute forme d’énergie, qu’elle soit matérielle ou sous forme de champ, contribue à la courbure de l’espace-temps.
Ainsi, \(\mathbf{T}_{\mathbf{\mu\nu}}\mathbf{\ }\)joue le rôle de source de la gravitation dans l’équation d’Einstein, tout comme la masse joue ce rôle dans la loi de Newton. La connaissance de \(T_{\mu\nu}\) dans une région donnée permet de déterminer la déformation de l’espace-temps induite par la matière et l’énergie qui s’y trouvent.
L’équation d’Einstein est un système de dix équations non linéaires couplées, car le tenseur métrique possède dix coefficients indépendants en quatre dimensions. Résoudre ces équations revient à déterminer la géométrie de l’espace-temps pour une distribution donnée de matière et d’énergie.
Les solutions peuvent être très complexes, mais certaines simplifications, notamment en s’appuyant sur les symétries, permettent d’obtenir des résultats fondamentaux : par exemple, la métrique de Schwarzschild pour un corps sphérique massif et isolé, ou la métrique de Friedmann-Lemaître-Robertson-Walker (FLRW) pour un Univers homogène et isotrope. Deux exemples que nous allons détaillé dans le chapitre suivant.
En résumé, l’équation d’Einstein unit la géométrie de l’espace-temps et la physique de la matière et de l’énergie, formalisant la vision radicalement nouvelle d’Einstein : l’univers n’est pas simplement un théâtre où se meuvent les corps soumis à des forces, mais une structure dynamique dont la géométrie et le contenu énergétique s’influencent mutuellement.
Exemples de métriques
Pour illustrer les concepts précédemment présentés, il est utile de considérer quelques exemples de métriques particulièrement importantes en relativité générale. Ces métriques permettent de relier les notions abstraites d’espace-temps courbe et de géodésiques à des situations physiques concrètes. Trois cas se détachent par leur rôle fondamental et leur portée pédagogique :
- La métrique de Minkowski, qui correspond à l’espace-temps plat de la relativité restreinte. Elle permet de décrire un univers sans gravitation et sert de référence pour toutes les situations où les effets gravitationnels sont négligeables.
- La métrique de Schwarzschild, qui décrit l’espace-temps autour d’une masse sphérique isolée. Elle constitue le modèle de base pour l’étude des trous noirs et des corps massifs compacts, et permet de comprendre des phénomènes tels que la déviation de la lumière et le décalage gravitationnel des horloges.
- La métrique de Friedmann–Lemaître–Robertson–Walker (FLRW), utilisée en cosmologie pour modéliser un univers homogène et isotrope en expansion. Elle est à la base du modèle standard de la cosmologie moderne et permet de relier la théorie de la relativité générale à l’évolution globale de l’Univers.
Ces trois métriques ont un double intérêt : elles offrent des illustrations relativement simples de la théorie, tout en jouant un rôle central dans des domaines essentiels de la physique contemporaine, allant de la relativité restreinte aux trous noirs et à la cosmologie. Elles constituent ainsi des exemples privilégiés pour comprendre comment la géométrie de l’espace-temps influence le mouvement des corps et la propagation de la lumière.
Métrique de Minkowski – La relativité restreinte
L’exemple le plus simple d’espace-temps est celui décrivant le vide gravitationnel : l’espace-temps de Minkowski. Il s’agit d’un espace affine pseudo-euclidien à quatre dimensions, qui modélise l’espace-temps de la relativité restreinte. Chaque point de cet espace représente un événement physique et est repéré par quatre coordonnées \(\left( ct,x,y,z \right)\), où \(t\)est le temps et \(\left( x,y,z \right)\ \)les coordonnées spatiales.
La particularité de cet espace affine, par rapport à un espace euclidien classique, réside dans sa pseudo-métrique, ou intervalle spatio-temporel, qui est invariante sous les transformations de Lorentz :
\[ds^{2} = c^{2}dt^{2} – dx^{2} – dy^{2} – dz^{2}\]
Où \(ds^{2}\ \)représente le carré de l’intervalle élémentaire entre deux événements infinitésimalement proches. Cette pseudo-métrique mesure le temps propre entre deux événements pouvant être reliés causalement, ou la distance propre entre eux s’ils sont séparés de manière « spatiale ».
Autour de chaque événement, l’ensemble des événements qui peuvent lui être reliés par un signal se déplaçant à la vitesse de la lumière forme un cône de lumière. Le futur est représenté par le cône orienté vers l’avenir et le passé par le cône orienté vers le passé. Ces cônes permettent de raisonner géométriquement sur la causalité et sont représentés dans des diagrammes appelés diagrammes de Minkowski, où l’on limite généralement l’espace à deux dimensions pour simplifier la visualisation.
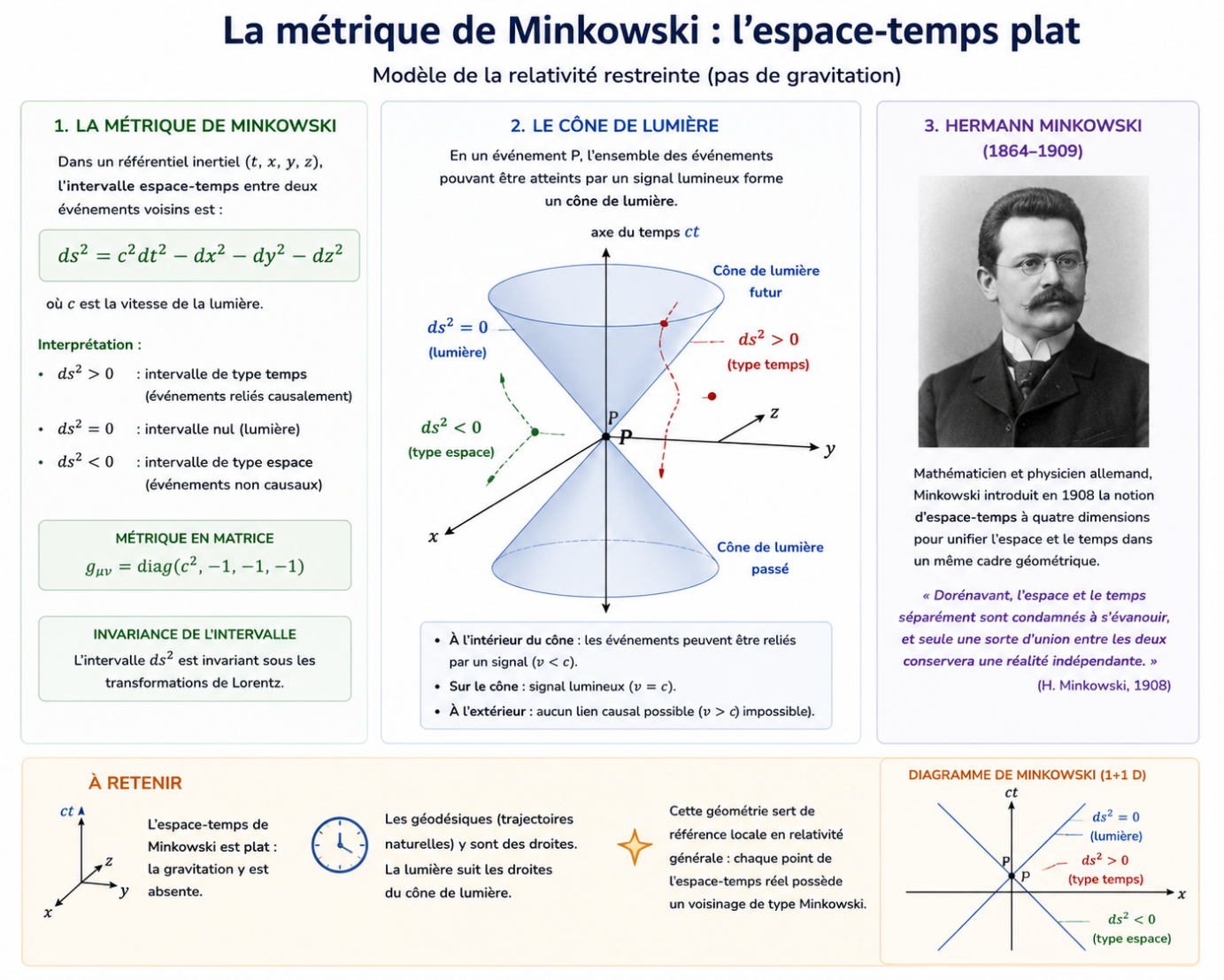
Malgré la distinction entre temps et espace, l’espace-temps de Minkowski est plat, au sens où sa courbure est nulle. Les géodésiques, c’est-à-dire les lignes d’univers des particules non soumises à des forces, sont des droites dans cet espace.
La ligne d’univers d’un corps ponctuel massif est une courbe dans cet espace-temps, mais toutes les courbes ne sont pas physiquement possibles. Une ligne d’univers réaliste doit avancer dans le temps et rester à l’intérieur du cône de lumière en chacun de ses points, ce qui garantit que la vitesse de la lumière n’est jamais dépassée. Pour une particule de masse nulle, comme un photon, la ligne d’univers se situe exactement sur le bord du cône de lumière et décrit une trajectoire rectiligne.
Ainsi, l’espace-temps de Minkowski fournit un cadre simple mais fondamental pour la relativité restreinte, où l’on peut étudier la causalité, le mouvement des corps et la propagation de la lumière dans un univers sans gravitation.
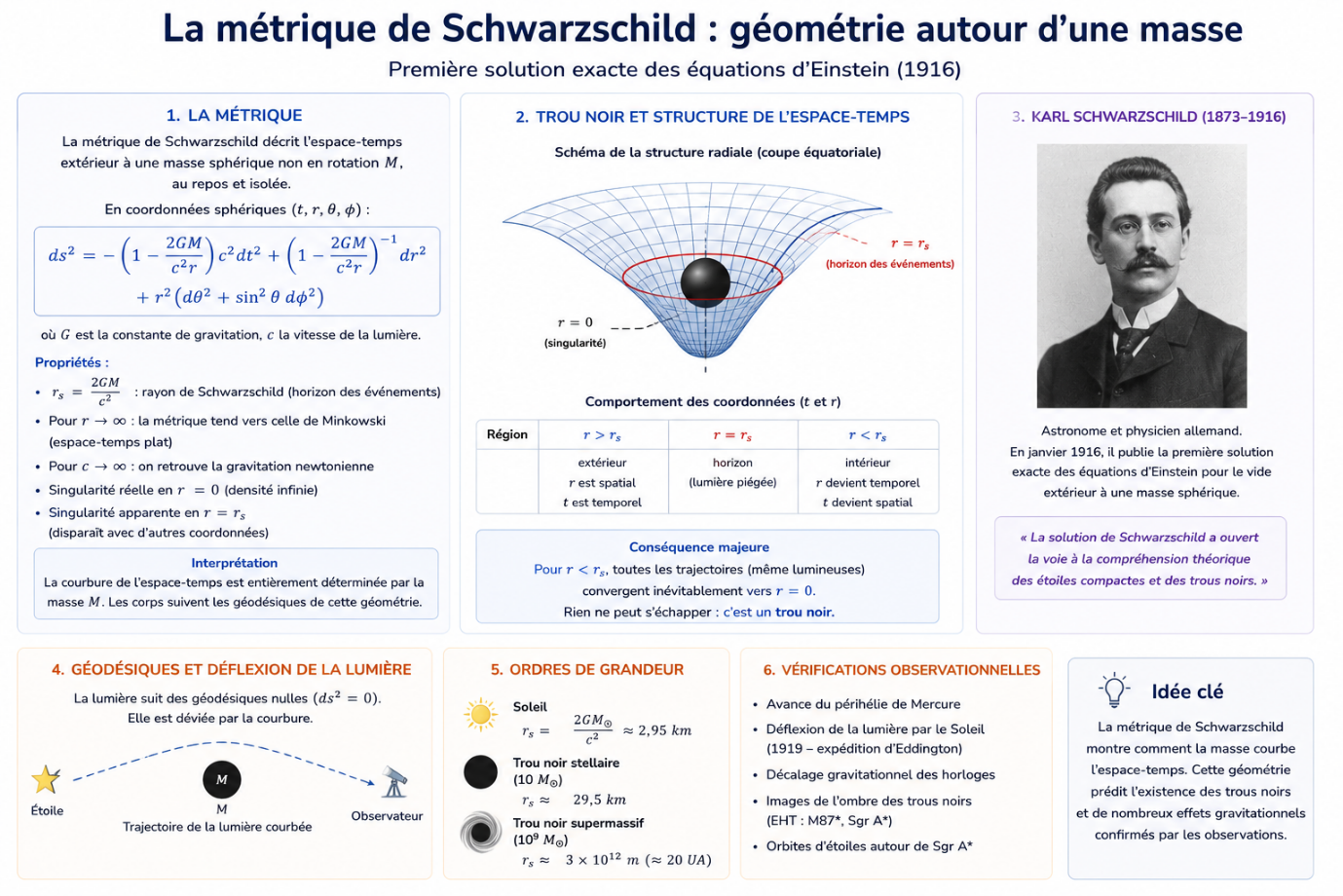
Métrique de Schwarzschild – les trous noirs
La métrique de Schwarzschild est la première solution exacte des équations de la relativité générale, publiée par Karl Schwarzschild en janvier 1916, à peine trois mois après la présentation de la relativité générale par Einstein. Cette solution décrit l’espace-temps autour d’une masse ponctuelle \(M\ \)immobile et isolée, et présente les caractéristiques suivantes : symétrie sphérique, vacuité en dehors du point central (\(T_{\mu\nu} = 0\)), et stationnarité (les coefficients de la métrique ne dépendent pas du temps). Elle modélise donc classiquement l’espace-temps autour d’une étoile ou d’une planète sans rotation.
Pour établir cette métrique, Schwarzschild s’est appuyé sur des arguments de symétrie. On cherche une solution des équations d’Einstein dans le vide (\(T_{\mu\nu} = 0\)) autour d’une masse ponctuelle \(M\). Les hypothèses suivantes permettent de simplifier considérablement le problème :
- Symétrie sphérique : l’espace-temps est invariant par rotation autour de la masse centrale. Cette hypothèse est naturelle pour une masse isolée sans rotation. Elle impose que les coefficients de la métrique ne dépendent pas des angles \(\theta\ \)et \(\phi\), mais seulement de la distance radiale \(r\).
- Stationnarité : la métrique ne dépend pas du temps \(t\), reflétant une situation où la masse centrale est immobile et stable.
- Vacuité : en dehors de la masse centrale, l’espace est vide, ce qui implique que le tenseur énergie-impulsion \(T_{\mu\nu}\ \)est nul.
Ces hypothèses permettent de réduire la forme générale d’une métrique sphérique et stationnaire à quatre coefficients inconnus, fonction de \(r\ \)seulement. On calcule ensuite les coefficients de Christoffel, le tenseur de Ricci et on impose l’équation d’Einstein dans le vide (\(R_{\mu\nu} = 0\)). La résolution de ce système différentiel simple par rapport au système général conduit à la forme explicite de la métrique que l’on appelle aujourd’hui métrique de Schwarzschild.
En coordonnées sphériques \(\left( t,r,\theta,\phi \right)\), l’intervalle élémentaire de la métrique de Schwarzschild s’écrit :
\[ds^{2} = \left( 1-\frac{2GM}{c^{2}r} \right)c^{2}dt^{2} – \left( 1-\frac{2GM}{c^{2}r} \right)^{- 1}dr^{2} – r^{2}(d\theta^{2} + {\sin}^{2}\theta\text{ }d\phi^{2})\]
Où \(G\ \)est la constante de gravitation, \(c\ \)la vitesse de la lumière, et \(r_{s} = 2GM/c^{2}\ \)le rayon de Schwarzschild.
On remarque immédiatement plusieurs propriétés importantes :
- Les coefficients de la métrique sont indépendants de \(t\), ce qui illustre la stationnarité de l’espace-temps.
- À grande distance (\(r \rightarrow \infty\)), la métrique tend vers l’espace-temps plat de Minkowski, ce qui correspond à l’oubli de la gravitation à l’infini.
- En prenant la limite \(c \rightarrow \infty\), on retrouve les équations classiques de Newton pour le mouvement autour d’une masse centrale.
La métrique de Schwarzschild présente deux singularités apparentes :
- Singularité de coordonnées à \(r = r_{s}\ \): le coefficient devant \(dr^{2}\ \)tend vers l’infini, mais il est possible de choisir d’autres coordonnées (par exemple celles de Kruskal-Szekeres) pour faire disparaître cette singularité. Il ne s’agit donc pas d’une singularité physique.
- Singularité réelle à \(r = 0\ \): cette singularité est physique et correspond au cœur de la masse ponctuelle, où la densité devient infinie.
Une autre propriété remarquable est que pour \(r < r_{s}\), les rôles des coordonnées \(t\) et \(r\) s’inversent : le temps devient une coordonnée radiale et l’espace devient « temporel », ce qui empêche toute trajectoire lumineuse ou matérielle de s’échapper du centre. C’est cette propriété qui conduit à la notion de trou noir. Pour un objet de masse solaire, le rayon de Schwarzschild vaut environ 3 km, illustrant la densité extrême nécessaire pour former un trou noir.
Enfin, cette métrique a été largement vérifiée par les observations : la précession du périhélie de Mercure, la déflexion de la lumière par le Soleil, et plus récemment, l’imagerie des horizons de trous noirs. Pour des objets en rotation, on utilise aujourd’hui la métrique de Kerr, qui généralise celle de Schwarzschild en introduisant la rotation et éventuellement le champ électromagnétique.
Pour conclure cette section sur les métriques illustratives de la relativité générale, il est intéressant de noter la progression des concepts. La métrique de Minkowski décrit l’espace-temps vide et plat, cadre de la relativité restreinte. La métrique de Schwarzschild illustre la géométrie autour d’une masse sphérique stationnaire et permet de comprendre la notion de trous noirs. Enfin, la métrique de Kerr généralise celle de Schwarzschild à une masse en rotation, introduisant des effets nouveaux comme la traînée de l’espace-temps. En coordonnées de Boyer-Lindquist \(\left( t,r,\theta,\phi \right)\), la métrique de Kerr s’écrit :
\[ds^{2} = – \left( 1-\frac{2GMr}{\Sigma c^{2}} \right)c^{2}dt^{2} – \frac{4GMar{\sin}^{2}\theta}{\Sigma c}\text{ }dt\text{ }d\phi + \frac{\Sigma}{\Delta}dr^{2} + \Sigma\text{ }d\theta^{2} + \left( r^{2}+a^{2}+\frac{2GMa^{2}r{\sin}^{2}\theta}{\Sigma c^{2}} \right){\sin}^{2}\theta\text{ }d\phi^{2}\]
Avec
\[\Sigma = r^{2} + a^{2}{\cos}^{2}\theta,\Delta = r^{2} – \frac{2GMr}{c^{2}} + a^{2},a = \frac{J}{Mc}\]
Dans cette équation, \(J\) est le moment angulaire de la masse centrale et \(a\ \)le paramètre de rotation associé à cet objet. Pour \(a = 0\), cette métrique se réduit à celle de Schwarzschild. Elle montre comment la rotation de la masse centrale modifie profondément la géométrie de l’espace-temps, entraînant des effets tels que le déplacement des orbites et le tourbillonnement de l’espace autour du corps massif.
Ces exemples montrent que la relativité générale permet de modéliser des situations variées : du vide plat à l’espace autour d’objets massifs et éventuellement en rotation. Le dernier exemple que nous allons examiner, la métrique FLRW, illustre l’univers à grande échelle et constitue la base du modèle cosmologique du Big Bang. Contrairement aux précédentes métriques centrées sur un corps, la métrique FLRW décrit un espace homogène et isotrope, adapté à l’étude de l’évolution globale de l’univers.
Métrique de Friedman-Lemaître-Robertson-Walker (FLRW) – La cosmologie
La métrique de Friedmann-Lemaître-Robertson-Walker (FLRW) décrit un espace-temps homogène et isotrope, c’est-à-dire identique en tout point et dans toutes les directions. En cosmologie, elle constitue l’outil fondamental pour modéliser l’évolution de l’Univers à grande échelle et sert de base au modèle cosmologique standard. Cette métrique ne décrit donc que la géométrie moyenne de l’Univers : elle permet de déterminer sa dynamique globale, en particulier l’expansion ou la contraction de l’Univers, à travers le facteur d’échelle \(a(t)\).
Un univers homogène et isotrope conserve ces propriétés au cours de son évolution. La formation des structures, comme les filaments et les amas de galaxies, ne peut être décrite par la métrique FLRW elle-même, mais apparaît lorsqu’on introduit de petites perturbations de densité autour de cette métrique. Ces perturbations, amplifiées par l’attraction gravitationnelle, sont responsables de l’édification progressive des grandes structures que nous observons dans l’Univers.
La métrique FLRW s’écrit sous la forme :
\[ds^{2} = – c^{2}dt^{2} + a(t)^{2}\left\lbrack \frac{dr^{2}}{1 – kr^{2}} + r^{2}(d\theta^{2} + {\sin}^{2}\theta\text{ }d\phi^{2}) \right\rbrack\]
Où \(a(t)\ \)est le facteur d’échelle, normalisé par \(a(t_{0}) = 1\ \)à l’instant présent, \(k\ \)représente la courbure spatiale (\(k = 0\) pour un univers plat, \(k = + 1\ \)sphérique, \(k = – 1\ \)hyperbolique), et \(t\) désigne le temps cosmique, mesuré par des observateurs comobiles, c’est-à-dire se déplaçant avec l’expansion de l’Univers. On reviendra sur ces notions dans le chapitre suivant.
Historiquement, cette métrique a été élaborée au cours des années 1920 par plusieurs physiciens travaillants indépendamment. Alexander Friedmann, en 1922 et 1924, a été le premier à proposer des solutions dynamiques des équations d’Einstein, montrant que l’Univers pouvait être en expansion ou en contraction. Georges Lemaître, en 1927, a développé de manière indépendante un modèle similaire et a relié l’expansion de l’Univers à l’observation du décalage vers le rouge des galaxies. Howard Robertson (1935) et Arthur Walker (1936) ont ensuite généralisé et formalisé cette métrique pour des espaces homogènes et isotropes, donnant naissance à la forme que l’on appelle aujourd’hui la métrique de Friedmann-Lemaître-Robertson-Walker (FLRW).
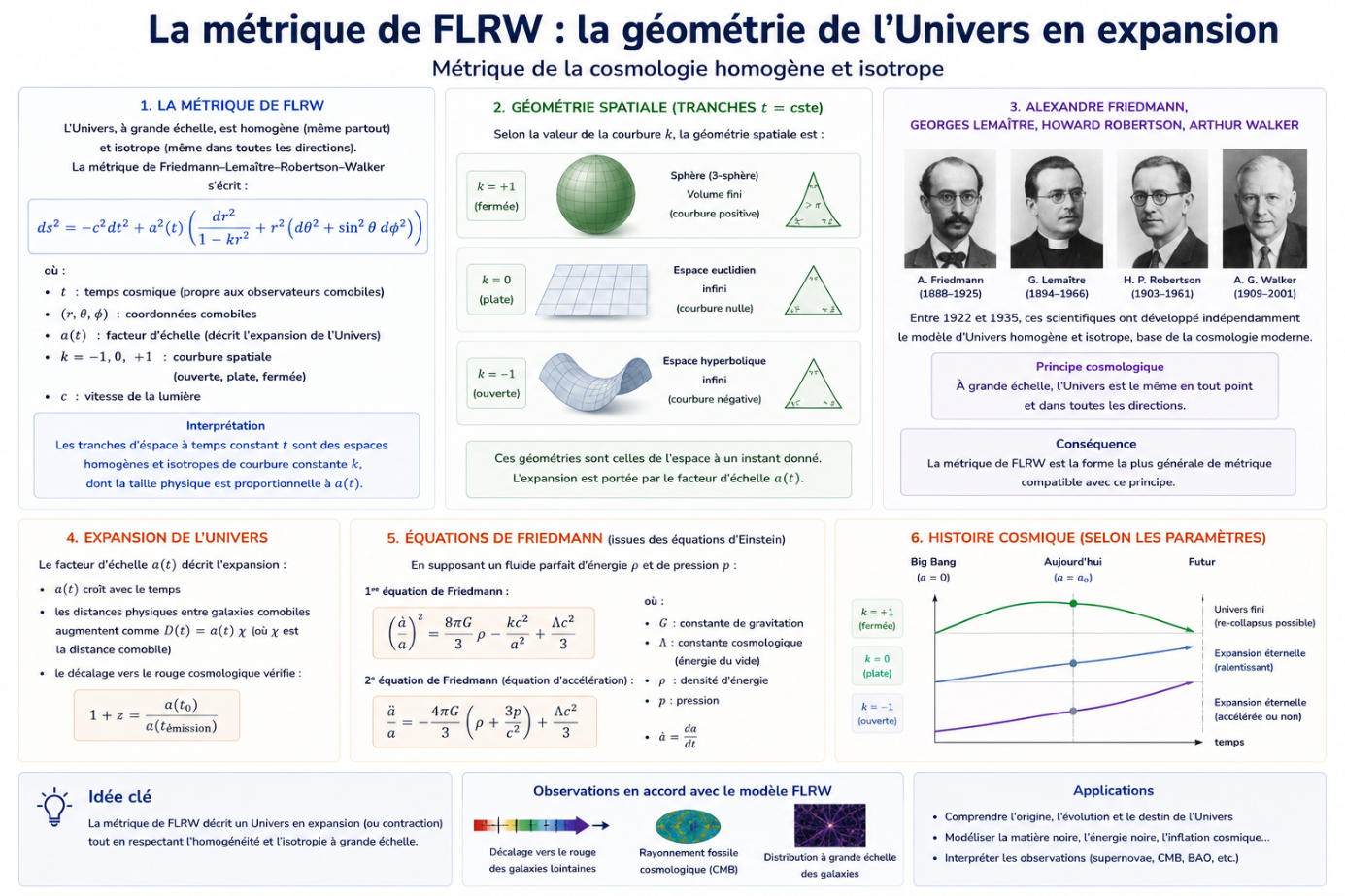
Cette métrique constitue le cadre dans lequel sont dérivées les équations de Friedmann, qui relient la dynamique de \(a(t)\ \)à la densité d’énergie et à la pression de l’Univers. Elle fournit donc un lien direct entre la géométrie de l’espace-temps et le contenu matériel et énergétique de l’Univers, illustrant pleinement la puissance de la relativité générale appliquée à la cosmologie.
Preuves expérimentales de la relativité générale
Depuis sa formulation en 1915, la relativité générale d’Einstein a été confrontée à de nombreuses observations et expériences. Ces tests ont permis de confirmer sa validité à différentes échelles, du système solaire aux phénomènes cosmiques extrêmes. La théorie n’est pas seulement une construction mathématique élégante : elle décrit avec une précision remarquable le comportement de la matière et de la lumière dans des champs gravitationnels intenses.
Le premier succès de la relativité générale a été l’explication de l’avance du périhélie de Mercure. Depuis le 19ème siècle, les astronomes avaient observé que l’orbite de Mercure autour du Soleil ne se fermait pas parfaitement : son périhélie se déplaçait légèrement à chaque révolution. Dès la publication de sa théorie en 1915, Einstein effectua le calcul et montra que la correction apportée par la courbure de l’espace-temps autour du Soleil expliquait exactement l’avance observée du périhélie, phénomène que la mécanique newtonienne ne pouvait rendre compte complètement. Cette prédiction, immédiatement vérifiable par les observations, constitua la première preuve de la validité de la théorie de la relativité générale.
Après la confirmation du périhélie de Mercure, la deuxième prédiction clé de la relativité générale concernait la déviation de la lumière par un champ gravitationnel, en particulier par le Soleil. Selon Einstein, la lumière des étoiles passant à proximité du Soleil devait être déviée d’un angle précis, résultant de la courbure de l’espace-temps. La mesure de cet effet exigeait de pouvoir observer des étoiles visibles près du Soleil, ce qui n’était possible qu’au cours d’une éclipse solaire totale.
C’est en 1919 qu’Arthur Eddington, astronome britannique, entreprit l’expédition pour vérifier cette prédiction. L’organisation logistique était extrêmement complexe : les équipes devaient se rendre sur des sites isolés (sur l’île de Príncipe au large de l’Afrique et à Sobral au Brésil) afin de photographier l’éclipse et comparer la position apparente des étoiles proches du Soleil avec leurs positions habituelles dans le ciel nocturne.
La tâche était rendue particulièrement difficile par les conditions météorologiques, la qualité des instruments, et les incertitudes liées à la mesure des angles si faibles (moins d’une seconde d’arc). De nombreux astronomes étaient sceptiques quant à la capacité d’obtenir un résultat fiable, mais Eddington fit preuve d’une obstination remarquable. Il insista pour mener l’expédition malgré les difficultés, convaincu de l’importance de tester la théorie d’Einstein.
Les mesures furent délicates et le traitement des plaques photographiques demanda un soin extrême. Finalement, Eddington et ses collaborateurs purent constater que la lumière des étoiles était bien déviée par le Soleil, dans un angle compatible avec la prédiction de la relativité générale, environ 1,75 seconde d’arc. Cette confirmation spectaculaire, annoncée publiquement en novembre 1919, fit sensation et propulsa Einstein et sa théorie sur le devant de la scène scientifique et médiatique.
Cette expérience ne fut pas la seule confirmation expérimentale de la relativité générale, mais elle fut la plus médiatisée et symboliquement marquante, car elle démontrait de manière tangible que la gravité n’était pas une simple force entre masses, mais une manifestation de la géométrie de l’espace-temps.
La relativité générale prédit également la dilatation du temps gravitationnel, un phénomène qui a été vérifié avec des horloges atomiques extrêmement précises. Des expériences montrent que le temps s’écoule plus lentement à proximité d’un champ gravitationnel intense qu’à distance. Ces effets sont essentiels dans la technologie moderne : par exemple, les satellites GPS doivent corriger leurs horloges en tenant compte de cette dilatation gravitationnelle pour garantir la précision des positions calculées.
Aux échelles extrêmes, la théorie a été confirmée par la découverte des ondes gravitationnelles, annoncée en 2016 par les détecteurs LIGO et VIRGO. Ces vibrations de l’espace-temps, émises lors de la fusion de trous noirs ou d’étoiles à neutrons, confirment des prédictions jusque-là inaccessibles à l’observation directe. L’analyse de ces signaux permet aujourd’hui de tester la relativité générale dans des conditions de champ gravitationnel très intense, jamais atteintes dans le système solaire.
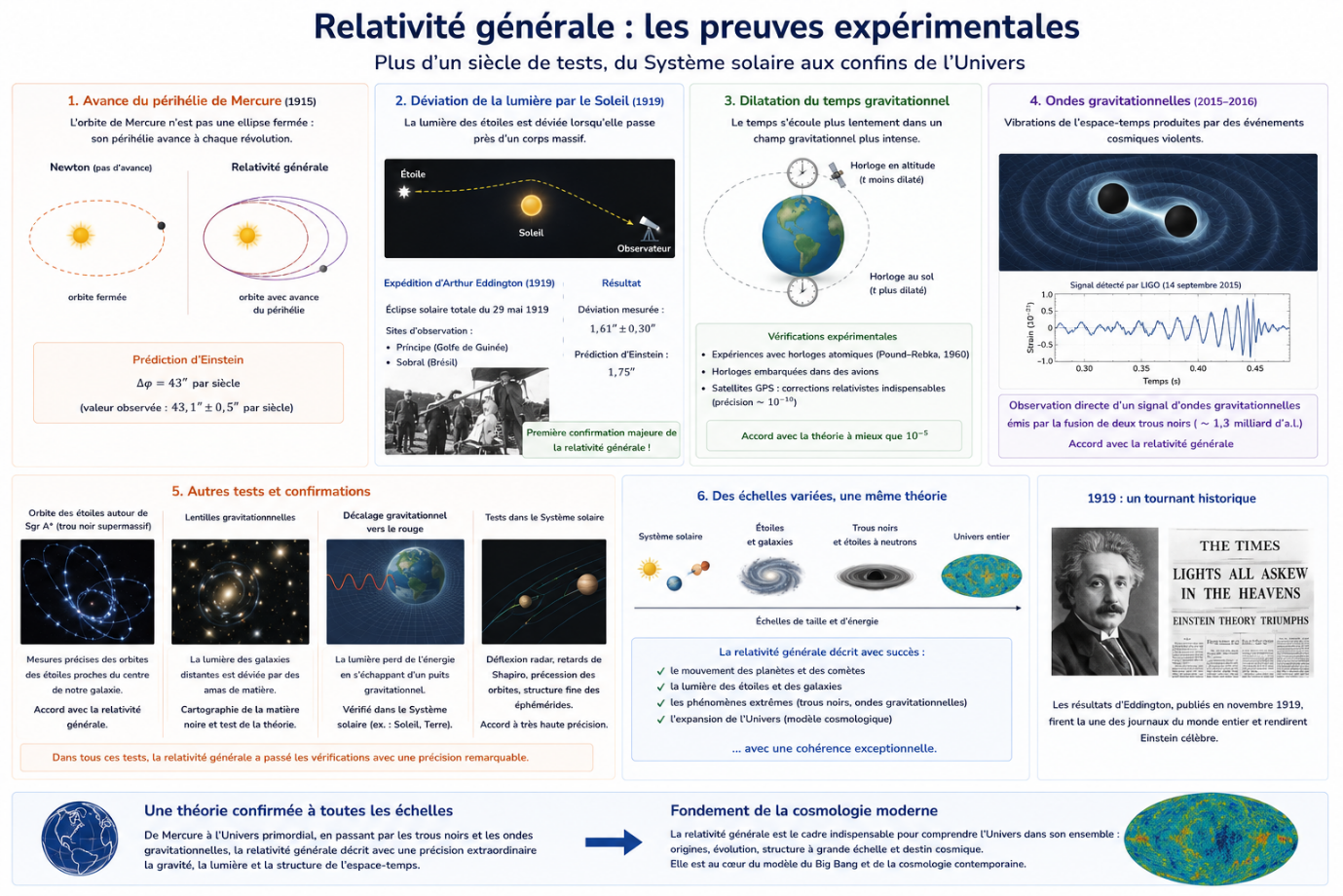
Enfin, d’autres tests plus récents continuent de vérifier la relativité générale, comme l’orbite des étoiles autour du trou noir supermassif au centre de la Voie lactée ou les lentilles gravitationnelles observées à grande échelle cosmique. Ces preuves expérimentales successives renforcent la confiance dans la relativité générale, et elles servent de fondement solide à toutes les applications modernes, de l’astrophysique aux modèles cosmologiques.
Forte de ces confirmations expérimentales, la relativité générale fournit le cadre théorique indispensable pour décrire l’Univers dans son ensemble. Elle permet de passer du domaine des étoiles et des planètes à celui des galaxies et de l’espace intergalactique, et surtout d’étudier l’évolution dynamique de l’Univers depuis ses origines. C’est sur cette base que se construit le modèle cosmologique du Big Bang, où l’espace-temps lui-même devient l’acteur central de l’histoire cosmique.
Conclusion
La relativité générale constitue l’une des plus profondes révolutions conceptuelles de la physique moderne. En remplaçant l’idée newtonienne d’une force gravitationnelle agissant à distance par celle d’une géométrie dynamique de l’espace-temps, Einstein a profondément transformé notre manière de penser la gravité. Les corps ne sont plus simplement attirés les uns par les autres : ils suivent les trajectoires naturelles imposées par la courbure de l’espace-temps, elle-même déterminée par la présence de matière et d’énergie.
Cette théorie repose sur quelques idées fondamentales : le principe d’équivalence, l’unification de l’espace et du temps, la notion de métrique, les géodésiques et les équations d’Einstein. Ensemble, elles permettent de passer d’une intuition physique simple, la chute libre comme mouvement naturel, à un cadre mathématique extrêmement puissant, capable de décrire aussi bien le mouvement des planètes que les trous noirs ou l’évolution globale de l’Univers.
Les exemples de métriques montrent la richesse de cette approche. L’espace-temps de Minkowski décrit le cas plat de la relativité restreinte ; la métrique de Schwarzschild révèle la géométrie autour d’un corps massif et ouvre la voie à la notion de trou noir ; la métrique FLRW fournit le cadre naturel de la cosmologie moderne. À travers ces solutions, la relativité générale apparaît non seulement comme une théorie de la gravitation, mais comme une théorie de la structure même de l’espace-temps.
Les nombreuses confirmations expérimentales, depuis l’avance du périhélie de Mercure jusqu’aux ondes gravitationnelles, en passant par la déviation de la lumière et la dilatation gravitationnelle du temps, ont progressivement fait de la relativité générale l’un des piliers les mieux établis de la physique contemporaine. Elle est aujourd’hui indispensable à l’astrophysique, à la cosmologie, à l’étude des objets compacts et même à des technologies quotidiennes comme le GPS.
Mais cette réussite n’épuise pas toutes les questions. La relativité générale demeure une théorie classique, continue et géométrique, alors que la physique microscopique repose sur la mécanique quantique. Aux échelles extrêmes du Big Bang, des singularités ou de l’échelle de Planck, cette tension devient incontournable. Ainsi, la relativité générale offre le cadre indispensable pour comprendre l’Univers à grande échelle, tout en indiquant elle-même les limites au-delà desquelles une théorie plus profonde reste à construire.